XiaoMi-AI文件搜索系统
World File Search System限制器
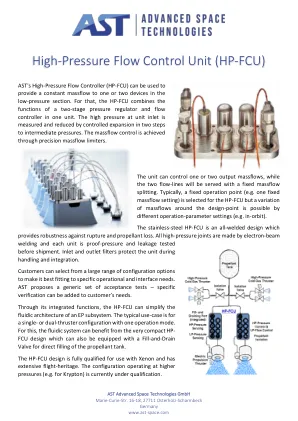
高压流量控制单元 (HP-FCU)
AST 的高压流量控制器 (HP-FCU) 可用于为低压部分的一个或两个设备提供恒定的质量流量。为此,HP-FCU 将两级压力调节器和流量控制器的功能结合在一个单元中。测量单元入口处的高压,并通过两步控制膨胀将其降低到中间压力。质量流量控制是通过精密质量流量限制器实现的。
RED ROOSTER 空气链葫芦 - Rami Yokota
• TOKU 高品质叶片电机和行星齿轮箱,配备长寿命润滑脂 • 负载限制器 • 高强度铸钢外壳,经久耐用 • 结构紧凑、重量轻,易于操作 • 延长工作周期和频繁反转 • 可变速度,可准确升降 • 带安全锁的合金钢钩(底部钩配有推力轴承,操作方便) • 可调节负载限制器(不适用于 TMM、TCR Mini 或 TCS) • 故障安全自动盘式制动器(全封闭)确保断电时负载不会掉落 • 紧急停止 • 机械上限和下限提升限位 • 提升高度可满足您的需求 • 可选择绳索、吊坠控制或控制系统 • 噪音低至 80 dB(消音器和过滤器易于更换) • 空气消耗低(TCR 和 TMH 型号) • 气压从 0.4 到 0.63 MPa • 在恶劣环境下耐用 • 维护成本低 • 在适当条件下易于获得备件 • 提升机机身在日本制造,其他所有部件在欧洲制造 • 欧洲/日本制造的高品质校准负载链具有 5:1 FOS • 高速(TCS 和 TMH 型号) • 特殊设计的起重机和小车 • 符合 EC 指令 2014/34/EU 的 Ex 分类 (ATEX
爬墙机器人:优化吸附和新型抽吸技术
摘要。本文回顾了爬壁机器人的进展,重点介绍了吸附优化和新型吸力技术。爬壁机器人因其在危险作业中的潜力以及在不影响机动性的情况下在各种墙面上导航的能力而引起了广泛关注。其中一项创新包括专为光滑墙面设计的机器人,集成了真空吸附系统和粘合带。这种设计增强了机器人的灵活性和可操纵性,并深入分析了其用于攀爬任务的附着机制。已经推导出稳定攀爬所需的吸附力和电机扭矩等关键参数,机器人的原型展示了在不同墙面上的高稳定性和适应性。另一项关键研究深入研究了吸入室中吸入压力的建模和实验分析,强调了不同室轮廓的作用。在腔室底部引入了一种底部限制器的新添加,并使用 3D 建模和计算流体动力学分析了其设计和性能。限制器对机器人粘附效率的影响已通过实验评估,在非抹灰砖墙上显示出良好的效果。通过这些研究,本文强调了爬墙机器人在不同应用中的不断发展和潜力。
多 FPGA 系统验证策略
通过 MILBUS-1553 与平台通信接口 通过 10 个内部开发的 ASIC(CRISA SECOiAs)控制和监控 >200 个锁存电流限制器作为分配模块 通过串行链路(UART)控制和监控 >40 个 DCDC 转换器 内部模拟遥测 OV 和 UV 保护 高速数据监控(HRDM)可捕获配置的最多 8 个 TM 通道数据速率直至完成 2Mbits 数据(125 Ksamples) 每个 DHS 板的 RTAX2000S @ 40 MHz LCL 板:

与手稿有关的补充材料
S18 S8或S9或S10或S11或S12或S13或S14或S15或S16或S17限制器 - 发布日期:20010101-;语言:英语;出版年:2001-;年龄组:成年(18岁及以上);出版年:2001-;英语;语言:英语;年龄组:成年(18岁及以上);人口组:人类;英语;人类;语言:英语;年龄组:所有成年人;英语;人类;年龄相关:所有成年人:19岁以上;英语;人类;年龄相关:所有成年人:19岁以上;语言:英语

DUALWATCH 双重录制 - Icom 法国
∙ 2000 个常规存储信道(带有 8 个字符的名称)∙ DTCS 和 CTCSS 音频静噪∙ VSC(语音静噪控制)( FM、FM-N、WFM、AM、AM-N)∙ AFC(自动频率控制)( FM、FM-N、WFM)∙ 噪声消除器(SSB、CW)∙ ANL(自动噪声限制器)(AM、AM-N)∙ RF 增益控制(10 级)∙ ATT 功能(3 级)∙ 按键锁功能∙ 监控功能∙ 省电功能(3 级)∙ 使用拨号或侧面按钮设置音量或频率∙ 快捷菜单功能∙ 时钟

date_technic_emzoom r-style
前安全气囊安全性(2)前安全气囊(2)窗帘式侧面安全气囊(2)首先带有预感器和强制限制器的安全带,并限制了第一个固定器的安全带,并带有不平衡的提醒(光和声音和声音)的第二台滴式式提醒的安全带(轻型)sloke dess slope slope Contract(Light)slope Control(Light)SLOPE CONTRAL(HHC)HHC(HHC)HHC(HHC) - 持有)稳定计划(ESP)轮胎压力监测系统(TPMS)ISOFIX锚定,用于安全座椅的安全座椅(带有反盗窃警报)
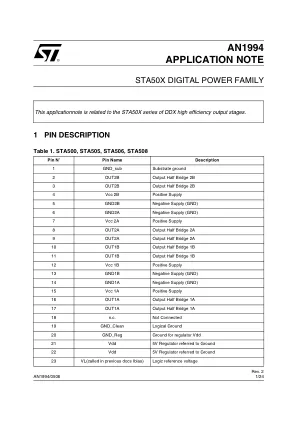
an1994-sta50x-digital-power-family ... - STMicroelectronics
绝对最大额定值不得超过(即使在换向尖峰期间)40V:超过此值可能会损坏设备。欠压:典型的激活阈值为 7V。过热:阈值结温为 150°C (±10°C),没有滞后(开启延迟可防止快速振荡)。FAULT 和 TH_WAR 的阈值正在跟踪中。过流:所有 IC 的最小过流值如上表所示。对于正常运行,通过负载的峰值必须小于过流限值。约 200 纳秒的内部延迟可防止电流限制器干预正常运行期间发生的电流尖峰。设备没有针对电感器前引脚直接短路的保护。重要的是所选电感器不会因额定指定电流而饱和。
HITEC 产品线 - Octopart
特点 - 符合人体工程学设计的 3 通道手枪式握把 FM 电脑收音机 - 2.4GHz 兼容 - 渐进式速率转向 - 超快 14ms 响应时间 - 高清/多像素 LCD 显示屏 - 双速率转向 - 制动 ATL 开关 - 制动杆行程限制器 - 方向盘张力调节 - 配平中心声音验证 - 第三通道“换档”按钮 - 发射器低电量警报 - 第三通道“线性”数字配平 - 泡沫方向盘,控制舒适 - 两种尺寸可互换的各种颜色橡胶握把垫 - 发射器充电插孔,用于随附的可充电电池 - 数字配平 - RF 指示灯 - 双速菜单滚动 - 总发射器“开启”时间计时器

萨博 JAS39 鹰狮直升机旋转和无忧机动试验期间的空气动力学和飞行动力学实时分析
JAS39 Gripen 的飞行控制系统 (FCS) 具有一项称为机动载荷限制器 (MLL) 的功能。其目的是在任何情况下都让飞行员发挥最大性能,而不会陷入失控或结构超载。即使 MLL 功能可以防止偏离正常包线,但如果忽略低速警告,也有可能进入极低速状态。为了评估 MLL 功能和旋转特性,萨博自 1995 年以来一直在进行飞行测试。为在这些测试中提高效率和降低成本而开发的一种新工具称为 ROMAC(实时在线模型和航空数据控制)。ROMAC 包括 Gripen 飞机的完整仿真模型,使用来自飞行测试飞机的遥测输入数据实时运行。只需一秒的延迟,现在就可以进行实时并行模拟,并比较结果