XiaoMi-AI文件搜索系统
World File Search System高精度

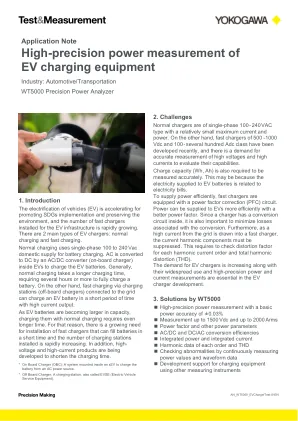
高精度电动电动机充电的高精度测量...
车辆(EV)的电气化正在加速促进可持续发展目标的实施和保护环境,并且为EV基础设施安装的快速充电器数量正在迅速增长。EV充电器有2种主要类型:正常充电和快速充电。普通充电使用单相100至240VAC国内供应电池充电。AC通过电动汽车内部的AC/DC转换器(车载充电器)转换为DC,以充电EV电池。通常,正常充电需要更长的充电时间,需要几个小时或更长时间才能充电电池充电。另一方面,连接到网格的充电站(板外充电器)快速充电可以在短时间内为电动汽车电池充电,而电流输出高。随着电动电池电池的容量越来越大,为正常充电充电需要更长的时间。因此,越来越需要安装快速充电器,这些快速充电器可以在短时间内填充电池,并且安装的充电站数量正在迅速增加。此外,正在开发高压和高电流产品以缩短充电时间。


高精度光学器件和光学系统
Media Lario 生产高规格光学元件和系统,用于太空和陆地天文学、卫星对地观测和自由空间光通信等应用。该公司采用获得专利的 Repli-formed Optics™ 工艺,这是一种产量极高、可复制性极高的制造方法,适用于大批量应用。

高精度的高精度测量
超导体中的Ferrell-Glover-Tinkham(FGT)和规则定义了超级流体密度ρs,是由于能量隙以下t c的打开而在ω= 0处转移到ω= 0的δ函数的光电导率频谱(SW)。在高t c超导体中,强烈的电子玻色子耦合,自我能量效应和能量尺度的交织可以将ρs与各种高能过程联系起来,这使得fgt总规则在丘比特中是否有效,以及对配对机构的全面了解,fgt总规则是否有效。在这里,我们报告了近乎掺杂的dyba 2 Cu 3 O 7-δ薄膜中FGT总规则的高精度测量值。我们通过结合亚毫米微波干涉仪,Terahertz时域光谱和红外椭圆测量方法来解决SW的低能平衡,以独立地获得0.8 MEV和1.1 eV之间的复杂介电函数的真实和虚构部分(6-9000 cm--------------------1)。通过将Kramers-Kronig一致性分析应用于测量的光谱,我们发现遵守FGT总和规则,并且总的内映于保守的SW在±0之内。低于能量量表的2%〜0。6 ev。我们归因于在低于0的电导率光谱中观察到的特定异常。6 eV与电荷载体偶联到集体抗磁性自旋爆发的光谱。此处介绍的程序应用于近乎掺杂的Dyba 2 Cu 3 O 7-δ,为如何在其他掺杂水平和化合物中研究FGT总规则的方案。

高精度QT分析
我们致力于在所有服务中坚持高标准。我们提供结构良好、清晰且一致的数据来支持您临床研究报告中的声明,同时遵守具有竞争力的时间表。除非另有约定,否则整个研究执行过程中均遵循 CHDR 自己的 Holter 数据收集标准操作程序 (SOP)。由荷兰心脏功能分析师培训基金会 (Stichting Beroepsopleiding Hartfunctielaboranten, SBHFL) 认证的 Holter 专家对单个研究的所有测量均不知情,测量时间、治疗和受试者编号均不知情,以避免观察者之间的差异。我们与 Holter 分析领域的合作伙伴 Intermark Technology BV(荷兰 Someren)密切合作。
高精度激光干涉仪反馈系统
为了进行补偿,RCU10 单元将编码器提供的正交输入转换为“分辨率单位”计数脉冲和相关方向(上/下线)。随后是数字缩放电路,允许更改有效分辨率,从而将激光波长相关单位转换为更标准的工程单位。(例如,在机床应用中,633 nm 通常转换为 1 µm。)缩放电路之后,注入器装置允许将“分辨率单位”脉冲添加或减去计数脉冲流。通过缩放和“分辨率单位”脉冲注入的组合来实现补偿。将这些校正应用于反馈后,将其转换为数字正交或模拟正弦/余弦并发送到控制系统。整个过程的延迟小于 2 µs。

高精度量子计算策略...
退相干和门误差严重限制了最先进的量子计算机的能力。这项工作引入了一种量子化学参考状态误差缓解 (REM) 策略,该策略可以直接在当前和近期的设备上实现。REM 可以与现有的缓解程序一起使用,同时只需要最少的后处理,并且只需要一次或不需要额外的测量。该方法与底层量子力学假设无关,并且专为变分量子特征值求解器 (VQE) 而设计。在超导量子硬件上证明了小分子 (H 2、HeH + 和 LiH) 基态能量计算精度提高了两个数量级。深度超过 1000 个两量子比特门的噪声电路的模拟用于论证该方法的可扩展性。

基于STM32微控制器的高精度激光测距
在电子工程的工业和研究领域,距离信息被视为关键测量之一 [1]。为了获得准确可靠的距离数据,具有测距能力的设备现在广泛应用于军事和工业领域,包括红外 (IR) 和超声波测距仪。然而,使用这些传统的测距系统会出现许多准确性问题,因为它们对周围环境非常敏感,特别是当暴露于非结构化和不可预测的物理环境(灰尘、温度、烟雾)或结构混乱的环境(瓦砾、碎片等)时 [2]。因此,提出了一种更可靠的测距方法。激光二极管发射高度定向的光束,具有体积小、亮度高、颜色纯、能量密度高和效率高的优点 [3][4]。最重要的是,激光测距系统不易受到环境影响,因为可以通过测量反射和散射回波信号的时间间隔、频率变化和光束方向来获得目标的距离和方向。使用激光测距方法的测量误差仅为其他光学测距仪的五分之一到百分之一 [5]。相位激光测距法因其高精度而受到广泛欢迎,然而其应用问题也不容忽视,观测到在频率漂移、噪声、大气折射等影响下,可能由于相位折叠或相位模糊而出现接近零步进误差[6]。Barreto 等人采用了三角测量激光测距法,但其灵敏度要求严格且功耗高[7]。本文研制了一种微型、便携、低功耗的激光测距系统,具有两种测量模式:高精度模式和长距离模式。本文研制了一种微型便携式激光测距系统,具有两种测量模式:高精度模式和长距离模式。该系统基于 VL53L0X 飞行时间激光测距传感器和 STM32F407 微控制器 [8]。