机构名称:
¥ 1.0
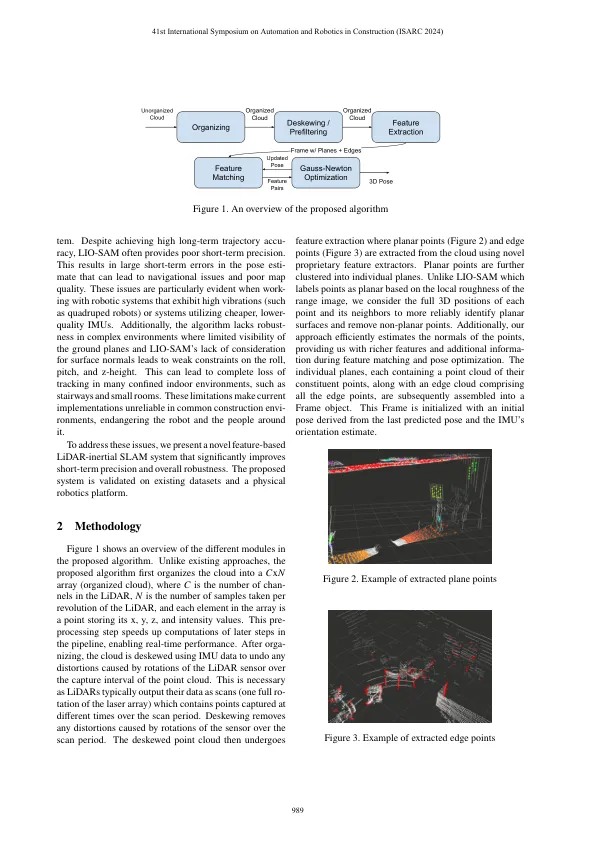
摘要 - 准确的定位在自主机器人系统的有效运行中起着至关重要的作用,尤其是在诸如施工站点之类的染色体环境中。同时使用LIDAR传感器同时定位和映射(SLAM)已成为一种流行的解决方案,因为它在没有外部基础架构的情况下可以进行功能。但是,现有的al-gorithms表现出重大的缺点。尽管当前的方法在长期轨迹上达到了很高的准确性,但它们在复杂的室内环境中的精确性和可靠性而苦苦挣扎。本文介绍了一种新型的基于功能的LiDAR SLAM系统,旨在解决这些局限性并增强短期精度和整体鲁棒性。使用现有数据集和物理机器人平台评估了所提出的系统,以解决当前实现的局限性,并在挑战现实世界中,尤其是在施工环境中展示改进的穿孔。
在施工环境中的强大高精度激光雷达本地化
主要关键词



相关文件推荐