机构名称:
¥ 2.0
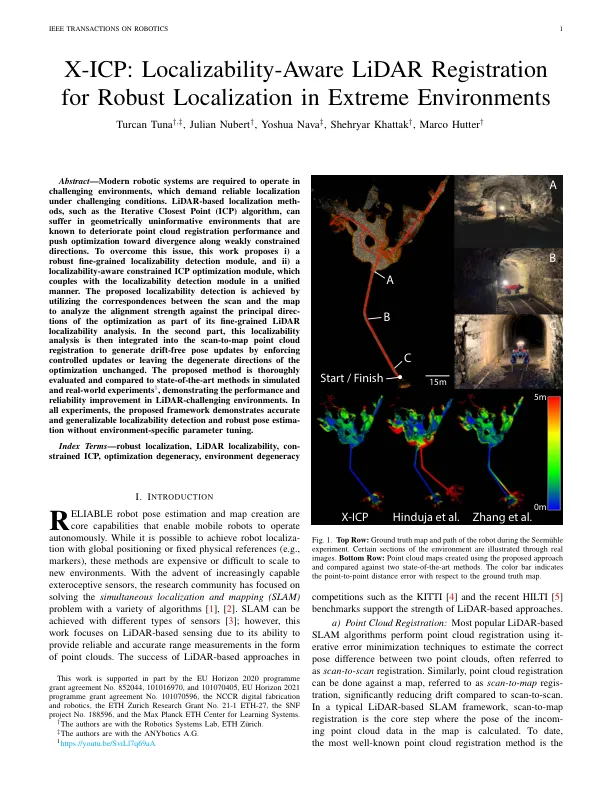
摘要 - 在具有挑战性的环境中需要可靠的定位,需要现代机器人系统才能运行。基于激光雷达的局部化方法,例如迭代最接近的点(ICP)算法,可能会在几何无知的环境中遭受损害,这些环境已知,这些环境已知会导致点云登记性能恶化,并沿弱受约束方向推动散落的优化。为了克服这个问题,这项工作提出了i)稳健的可局部性检测模块,ii)局限性感知到的受限的ICP优化模块,该模块将其与统一的局限性检测模块相结合。通过利用扫描和地图之间的对应关系来实现所提出的可区分性检测,以分析优化的主要方向的对齐强度,作为其细粒度的LIDAR固定性分析的一部分。在第二部分中,然后将此可本质性分析集成到扫描到映射点云注册中,以通过执行受控更新或离开优化的脱位方向来生成无漂移姿势更新。所提出的方法经过彻底评估并将其与模拟和现实世界实验1中的最新方法进行了比较,证明了激光挑战环境的性能和可靠性提高。在所有实验中,所提出的框架表明没有环境特异性参数调整的准确且可推广的可局部性检测和可靠的姿势估计。
X-ICP:在极端环境中稳健本地化的可本质性感光激光雷达注册
主要关键词


相关文件推荐