XiaoMi-AI文件搜索系统
World File Search SystemAGX

cv
对CVPR SOTA的准确性提高。纽约顾问,纽约及纽约的3D高斯剥落:霍姆·孙教授,人民大学和哥伦比亚大学哥伦比亚大学Changxi Zheng教授,2024年8月 - 目前•设计的物理学深度神经网络可从纯粹的视觉监督下自动估算,以推断出可比较的范围: BIM Model Reconstruction System (Bachelor Thesis Project with $15000 founding) Ningbo, CN Advisor: Prof. Adam Rushworth, University of Nottingham, Ningbo Jun 2021 – Jul 2022 • Designed and prototyped a novel autonomous mobile robot system for Building Information Modeling (BIM) • Built modular hardware stack with multi-modal sensors, Jetson Xavier AGX computing unit, and robust power & signal系统•构建了一个完整的基于ROS的软件堆栈,包括乌尔德设计,低级控制,凉亭仿真,基于激光雷达纽约顾问,纽约及纽约的3D高斯剥落:霍姆·孙教授,人民大学和哥伦比亚大学哥伦比亚大学Changxi Zheng教授,2024年8月 - 目前•设计的物理学深度神经网络可从纯粹的视觉监督下自动估算,以推断出可比较的范围: BIM Model Reconstruction System (Bachelor Thesis Project with $15000 founding) Ningbo, CN Advisor: Prof. Adam Rushworth, University of Nottingham, Ningbo Jun 2021 – Jul 2022 • Designed and prototyped a novel autonomous mobile robot system for Building Information Modeling (BIM) • Built modular hardware stack with multi-modal sensors, Jetson Xavier AGX computing unit, and robust power & signal系统•构建了一个完整的基于ROS的软件堆栈,包括乌尔德设计,低级控制,凉亭仿真,基于激光雷达

Jaist存储库
摘要 - 无人驾驶汽车(UAV)对关键应用(例如搜索和救援操作)具有巨大的潜力,在搜索和救援行动中,对室内环境的准确感知至关重要。然而,本地化,3D重建和语义细分的同时融合呈现出一个明显的障碍,尤其是在配备有限的功率和计算资源的UAV背景下。本文提出了一种新的方法,可以解决无人机操作中语义信息提取和利用方面的挑战。我们的系统集成了最先进的视觉大满贯,以估计后端的全面的6多姿势和高级对象分割方法。为了提高框架的计算和存储效率,我们采用了简化的基于体素的3D地图表示 - OctOmap来构建工作系统。此外,融合算法是不合适的,可以从前端大满贯任务和相应点获得每个帧的语义信息。通过利用语义信息,我们的框架增强了无人机在室内空间中感知和导航的能力,从而解决了姿势估计准确性和降低不确定性的挑战。通过凉亭模拟,我们验证了我们提出的系统的功效,并将我们的方法成功地嵌入了用于现实世界应用的Jetson Xavier AGX单元中。索引项 - 语义映射,S3M,无人机,ROS,SLAM。

通过无人机检查自动太阳能检查的实时对象检测
摘要:太阳能检查需求的机器人任务敏捷和精确的对象检测策略。本文介绍了一个创新的基于关键的对象检测框架,专门为使用无人机实时的太阳能农场检查而设计。脱离常规边界框或细分方法,我们的技术着重于检测太阳能电池板的顶点,太阳能电池板的顶点比传统方法提供了更丰富的粒度。从Centernet中汲取灵感,我们的体系结构已针对Nvidia Agx Jetson Orin等嵌入式平台进行了优化,以1024×1376像素的分辨率达到接近60 fps,因此超过了相机的操作频率。这样的实时功能对于在时间关键的工业资产检查环境中有效的机器人操作至关重要。我们的模型的设计强调了减少的计算需求,将其定位为现实部署的实用解决方案。此外,积极学习策略的整合有望大大减少注释工作,并增强模型的运营可行性。总而言之,我们的研究强调了基于关键的对象检测的优势,为使用无人机的实时太阳能农场检查提供了一种实用有效的方法。

Jaist存储库
摘要 - 自主在现实世界环境中进行自主导航,搜索和救援操作的特殊性,无人驾驶飞机(UAVS)需要全面的地图以确保安全。但是,普遍的度量图通常缺乏对整体场景理解至关重要的语义信息。在本文中,我们提出了一个系统来构建一个概率度量图,并富含从RGB-D图像中从环境中提取的对象信息。我们的方法结合了前端的最先进的Yolov8对象检测框架和后端的2D SLAM方法 - 制图师。为了有效跟踪从前端接口提取的语义对象类别类别,我们采用了创新的bot-sort方法。引入了一种新颖的关联方法来提取对象的位置,然后用度量图将其投影。与以前的研究不同,我们的方法在具有各种空心底部对象的环境中可靠地导航。我们系统的输出是概率图,它通过合并特定于对象的属性,包括类别的差异,准确定位和对象高度来显着增强地图的表示形式。已经进行了许多实验来评估我们提出的方法。结果表明,机器人可以有效地产生包含多个对象(尤其是椅子和桌子)的增强语义图。此外,在嵌入式计算机-Jetson Xavier AGX单元中评估我们的系统,以在现实世界应用中演示用例。索引项 - 语义映射,无人机,ROS,度量图。

radarnext:基于4D MMWave Imaging Radar
摘要 - 3D对象检测对于自动驾驶(AD)和高级驾驶员辅助系统(ADA)至关重要。但是,大多数3D检测器优先考虑检测准确性,通常会忽略实际应用中的网络推理速度。在本文中,我们提出了基于4D MMWave雷达点云的实时可靠的3D对象检测器RadarNext。它利用可重新参数的神经网络来捕获多尺度功能,降低记忆成本并加速推理。此外,为了突出雷达点云的不规则前景特征并抑制背景混乱,我们提出了一个可变形的可变形前景增强网络(MDFEN),以确保检测准确性,同时小型地牺牲了速度的牺牲和参数的过多。dive viewt和tj4dradset数据集的实验结果验证了Radarnext的出色性能和效率,使用我们提出的MDFEN实现了50.48和32.30映射的变体。值得注意的是,我们的radarnext变体在RTX A4000 GPU上达到了超过67.10 fps的推理速度,而Jetson AGX Orin上的推理速度则达到了28.40 fps。这项研究表明,Radarnext带来了基于4D MMWave雷达的3D感知的新颖有效的范式。索引项 - 4D mmwave雷达; 3D对象检测;基于边缘的感知;轻量级感知模型
![[SSC21-I-12]](/simg/f\ff928d6c92e522ff5dfa9eca80272f7dfc966734.webp)
[SSC21-I-12]
随着发射的成本暴跌,现在比以往任何时候都更容易进入轨道。这导致了每年发射的卫星数量的扩散,导致每天的数据的链接下降。地面站收到的数据通常是未经处理的,这使得考虑到大型数据大小,并且并非所有数据都有用。这加上对实时数据处理的需求不断增长,导致对轨道处理解决方案的需求不断增长。在这项工作中,我们通过将不同的图像压缩技术应用于卫星数据来研究基于CNN的对象检测器在受约束设备上的性能。我们检查了Nvidia Jetson Nano和Nvidia Jetson Agx Xavier的功能;低功率,高性能计算机,具有集成的GPU,足够小,可以在板载纳米卫星上装配。我们仔细研究了对象检测网络,包括单镜头多伯克斯检测器(SSD)和基于区域的完全卷积网络(R-FCN)模型,这些模型已在DOTA上进行了预训练 - 在空中图像中用于对象检测的大型数据集。性能是根据执行时间,内存消耗和准确性来衡量的,并与包含具有两个功能强大GPU的服务器的基线进行比较。结果表明,通过应用图像压缩技术,我们能够改善执行时间和内存消耗,从而实现完全可运行的数据集。无损压缩技术的执行时间大约减少了10%,记忆消耗降低了3%,对准确性没有影响。虽然有损耗的压缩技术将执行时间提高了144%,并且记忆消耗减少多达97%。但是,它对准确性有重大影响,具体取决于压缩比。因此,这些压缩技术的应用和比率可能会根据特定任务所需的准确性水平而定。
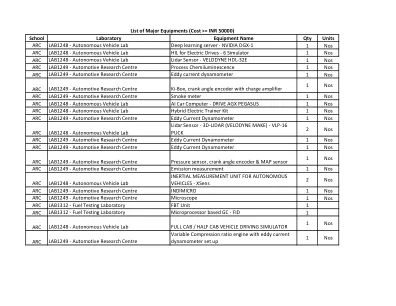
学校实验室设备名称数量单位ARC LAB1248
ARC LAB1249 - 汽车研究中心燃烧压力传感器 1 件 ARC LAB1248 - 自动驾驶汽车实验室直流电子负载 1 件 ARC LAB1248 - 自动驾驶汽车实验室摄像头 - BASLER TOF 摄像头 1 件 ARC LAB1249 - 汽车研究中心压电电阻压力传感器 1 件 ARC LAB1248 - 自动驾驶汽车实验室摄像头传感器 - Sekonix 5 件 ARC LAB1248 - 自动驾驶汽车实验室摄像头传感器 - Sekonix 5 件 ARC LAB1249 - 汽车研究中心涡流测功机 1 件 ARC LAB1248 - 自动驾驶汽车实验室小型地面机器人 1 件 ARC LAB1249 - 汽车研究中心压力传感器 1 件 ARC LAB1248 - 自动驾驶汽车实验室 NVIDIA AGX XAVIER 开发套件 2 件 ARC LAB1249 - 汽车研究中心带双缸柴油发动机的基础框架 1 件 ARC LAB1248 - 自动驾驶汽车实验室微孔气体扩散层 20 件 ARC LAB1249 - 汽车研究中心带直流发电机设置的变速发动机 1 件 ARC LAB1249 - 汽车研究中心 AVL 带 LED 遥控器的烟雾计 1 件 ARC LAB1249 - 汽车研究中心发动机组件 1 件 ARC LAB1249 - 汽车研究中心旋转式流量计 1 件 ARC LAB1249 - 汽车研究中心阴极射线示波器 1 件 ARC LAB1249 - 汽车研究中心铅酸电池 12 伏 100 AH 3 件

OCAP:个性化边缘DNN模型的设备上的班级感知修剪
在本文中,我们提出了一种用于边缘系统的新设备类感知的修剪方法,即OCAP。背后的动机是,深度神经网络(DNN)模型通常经过大型数据集训练,以便他们可以学习更多的多样性功能并被概括以准确预测众多类别。一些作品表明某些功能(频道)仅与某些类有关。和边缘系统通常在系统检测到的特定环境中实现。结果,为特定边缘环境实施一般培训模型会导致不必要的冗余。同时,将一些数据和模型转移到云中以进行个性化会导致隐私问题。因此,我们可能有一种在设备上意识到的修剪方法来删除与类无关紧要的通道,而边缘系统主要观察到,从而减少了模型的浮点操作(拖放),记忆足迹,潜伏期,潜伏期,能源效率,提高能量效率,并提高了相对较高的类别的准确性,并在同时保护了SITUD DATA DAPAIN PLISTERS PLASSICS。OCAP提出了一种基于输入图像的中间激活的新型类感知的修剪方法,以识别类 - 近距离的通道。此外,我们提出了一种基于KL差异的方法,以选择有效调整修剪模型的多样性和代表性数据。实验结果显示了OCAP的有效性和效率。与最先进的类感知的修剪方法相比,OCAP具有更好的准确性和更高的压缩比。代码可在https://github.com/mzd22222/ocap上获得。此外,我们在Nvidia Jetson Nano,Nvidia Jetson TX2和Nvidia Jetson Agx Xavier上评估了OCAP,在效率方面,实验结果证明了OCAP在边缘系统上的适用性。

边缘的计算机视觉:使用redmycow系统实时实时识别
在精确的牲畜种植中,牛的个体识别对于为赋予动物福利,健康和生产力做出的决定提供了至关重要的。在文字中,存在可以读取耳罩的模型;但是,它们不容易携带到现实世界中的牛生产环境,并主要在静止图像上做出预测。我们提出了一个基于视频的牛耳牌阅读系统,称为deRmycow,该系统利用视频中的节奏特性来准确检测,跟踪和读取边缘设备上25 fps的牛耳标。对于视频中的每个帧,ReDmycow在两个步骤中发挥作用。1)标签检测:Yolov5s对象检测模型和NVIDIA DEEPSTREAM跟踪层检测并跟踪存在的标签。2)标签读数:小说whentoread mod-ule决定是读取每个标签,使用trba场景文本识别模型或使用从前框架上读取的读数。该系统是在边缘设备上实现的,即NVIDIA JETSON AGX ORIN或XAVIER,使其可移植到没有外部计算资源的牛生产环境中。要达到实时速度,请阅读 - MyCow仅在当前框架中读取检测到的标签,如果它认为在当前框架中明显改善决策时,它将获得更好的读数。理想情况下,这意味着即使标签被遮挡或模糊,也可以在视频中找到标签的最佳读数并存储在视频中。在真正的中西部奶牛场住房测试该系统时,9,000头母牛,雷米科(Demmycow)系统准确地阅读了96.1%的印刷耳廓,并证明了其现实世界中的商业潜力。devmycow为商业牛农场提供了知情的数据驱动决策流程的机会。

丰田,Aurora和Continental加入NVIDIA合作伙伴的成长名单,将下一代高度自动化和自动驾驶汽车舰队
本新闻稿中的某些陈述包括但不限于:NVIDIA产品,服务和技术的好处,影响和性能,包括NVIDIA加速计算和AI,NVIDIA DRIVE AGX ORIN,NVIDIA DRIVEOS操作系统; NVIDIA CUDA AV平台,NVIDIA DRIVE ORIN,NVIDIA DGX系统,Nvidia Omniverse平台和NVIDIA OVX系统; Nvidia Cosmos,第三方使用或采用NVIDIA的产品和技术,收益和影响以及其产品的功能,性能和可用性;汽车是最大的AI和机器人行业之一; NVIDIA带来了二十年的汽车计算,安全专业知识及其CUDA AV平台来转变数万亿美元的汽车行业,这是前瞻性陈述,这些陈述受风险和不确定性的影响,可能会导致结果与期望实质上不同。向SEC提交的报告的副本已发布在公司网站上,可在NVIDIA上免费获得。这些前瞻性陈述不能保证未来的绩效,并且仅在此日期开始说话,除了法律要求外,Nvidia违反了更新这些前瞻性陈述以反映未来事件或情况的任何义务。可能导致实际结果差异的重要因素包括:全球经济状况;我们依靠第三方制造,组装,包装和测试我们的产品;技术发展和竞争的影响;开发新产品和技术或对我们现有产品和技术的增强;市场接受我们的产品或合作伙伴的产品;设计,制造或软件缺陷;消费者偏好或需求的变化;行业标准和界面的变化;集成到系统中时,我们的产品或技术的性能意外丧失;以及其他因素不时详细介绍了与美国证券交易委员会(SEC)或SEC的NVIDIA文件中详细介绍的,包括但不限于其表格10-K和表格10-Q的季度报告的年度报告。