XiaoMi-AI文件搜索系统
World File Search SystemAnalog

adau1401.pdf - ADI 公司
将图8替换为图11.....................................................................15 重命名“工作原理”部分.....................................................17 更改“初始化”部分.....................................................................18 更改“设置主时钟/PLL 模式”部分.....................19 替换图22至图25.........................................................................26 更改“EEPROM 格式”部分.............................................................28 删除表21,按顺序重新编号.............................................................29 插入图28,按顺序重新编号.............................................................29 更改图37.....................................................................................49 更改图38.....................................................................................50 更改图39.....................................................................................51
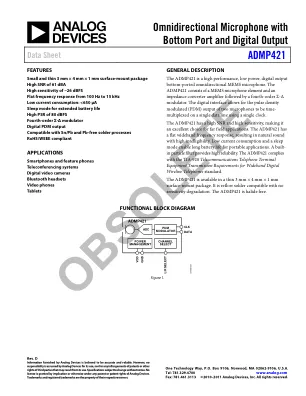
ADMP421 - ADI 公司
11/11—修订版C 至修订版D 将 PSRR 更改为 PSR ......................................................... 通用 将表 4 中的无铅温度从 245°C 更改为 260°C ..5 更改图 8 和图 9 .................................................................... 8 增加“备用 PCB 焊盘图案”部分 ............................................. 9 更改表 6 中的温湿度偏差(THB)说明 ............................................. 12 8/11—修订版B至修订版C 更改表1中的时钟频率和电源电压参数..................................................................................... 3 更改表3和表4 ........................................................................................ 5 删除“节能特性”部分........................................................................ 8 更改图9 ........................................................................................ 8 增加“应用信息”部分........................................................................ 9 增加“支持文档”、“评估板用户指南”、“电路笔记”和“应用笔记”部分............................................................. 9 更改“与模拟设备编解码器接口”部分............................................................. 9 移动“休眠模式”部分和“在多麦克风应用中禁用一个麦克风时的节能效果”部分......................................................................... 9 更改图10 ........................................................................................ 9 更改“贴片设备”部分............................................................................................ 10 删除“评估板”部分............................................................................................ 10 删除图10和图11;按顺序重新编号......................................................................................... 10重新按顺序编号................................................. 10 删除图 12.............................................................................. 11 更改表 6 中的温度循环描述.............................................. 11 更改订购指南.............................................................................. 12
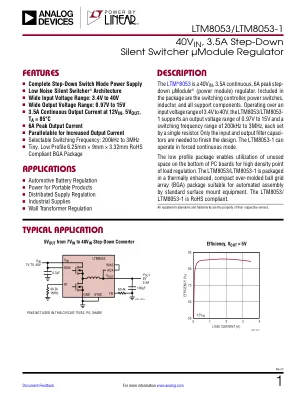
LTM8053-8053-1.pdf - ADI 公司
注 1:超过绝对最大额定值所列的应力可能会对器件造成永久性损坏。长时间暴露在任何绝对最大额定值条件下可能会影响器件的可靠性和寿命。注 2:除非另有说明,绝对最小电压为零。注 3:LTM8053E/LTM8053E-1 保证满足内部 0°C 至 125°C 的性能规格。整个内部工作温度范围 –40°C 至 125°C 的规格由设计、特性和与统计过程控制的相关性保证。 LTM8053I/LTM8053I-1 保证在整个 –40°C 至 125°C 内部工作温度范围内满足规格。请注意,最高内部温度由特定工作温度决定

adau1701.pdf - ADI 公司
28/56 位、50 MIPS 数字音频处理器 2 个 ADC:SNR 为 100 dB,THD + N 为 −83 dB 4 个 DAC:SNR 为 104 dB,THD + N 为 −90 dB 完全独立操作 从串行 EEPROM 自引导 带有 4 输入多路复用器的辅助 ADC,用于模拟控制 用于数字控制和输出的 GPIO 可通过 SigmaStudio 图形工具进行完全编程 28 位 × 28 位乘法器,带有 56 位累加器,可实现全双精度处理 时钟振荡器,用于从晶振生成主时钟 PLL,用于从 64 × f S 、256 × f S 、384 × f S 或 512 × f S 时钟生成主时钟 灵活的串行数据输入/输出端口,具有 I2S 兼容、左对齐、右对齐和 TDM 模式 支持高达 192 kHz 的采样率与 3.3 V 系统兼容的电压调节器 48 引线、塑料 LQFP
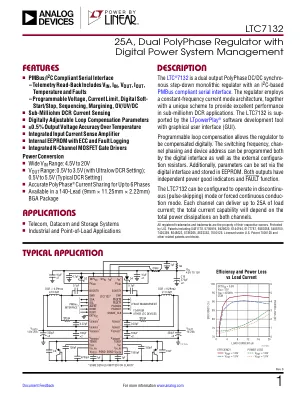
LTC7132 - ADI 公司
注 1:超过绝对最大额定值所列的应力可能会导致器件永久性损坏。长时间暴露在任何绝对最大额定值条件下都可能影响器件的可靠性和寿命。 注 2:LTC7132 在脉冲负载条件下进行测试,即 T J ≈ T A 。LTC7132E 保证满足 0°C 至 85°C 范围内的性能规格。–40°C 至 125°C 工作结温范围内的规格通过设计、特性和与统计过程控制的相关性来保证。LTC7132I 在整个 –40°C 至 125°C 工作结温范围内均有保证。T J 根据以下公式根据环境温度 T A 和功率耗散 P D 计算得出:T J = T A + (P D • θ JA ) 符合这些规格的最大环境温度由特定工作条件与电路板布局、额定封装热阻和其他环境因素共同决定。注 3:流入器件引脚的所有电流均为正;流出器件引脚的所有电流均为负。除非另有说明,否则所有电压均以地为基准
模拟电子学(REC3C001)
模块 — I(12 小时) MOS 场效应晶体管:FET 和 MOSFET 的原理和操作;P 沟道和 N 沟道 MOSFET;互补 MOS;E- MOSFET 和 DMOSFET 的 VI 特性;MOSFET 作为放大器和开关。BJT 的偏置:负载线(交流和直流);工作点;固定偏置和自偏置、带电压反馈的直流偏置;偏置稳定;示例。FET 和 MOSFET 的偏置:固定偏置配置和自偏置配置、分压器偏置和设计模块 — II(12 小时)BJT 的小信号分析:小信号等效电路模型;CE、CC、CB 放大器的小信号分析。Rs 和 RL 对 CE 放大器操作的影响、射极跟随器;级联放大器、达林顿连接和电流镜电路。 FET 的小信号分析:小信号等效电路模型、CS、CD、CG 放大器的小信号分析。CS 放大器上的 RsiG 和 RL 的匹配;源极跟随器和级联系统。模块 —III(8 小时)FET 和 BJT 的高频响应:BM 和 FET 的高频等效模型和频率响应;CS 放大器的频率响应、CE 放大器的频率响应。模块 —IV(6 小时)反馈放大器和振荡器:负反馈和正反馈的概念;四种基本反馈拓扑、实用反馈电路、正弦振荡器原理、WeinBridge、相移和晶体振荡器电路、功率放大器(A、B、AB、C 类)。模块 — V(7 小时)运算放大器:理想运算放大器、差分放大器、运算放大器参数、非反相配置、开环和闭环增益、微分器和积分器、仪表放大器。书籍:
未来是模拟的:基于Memristor的模拟计算
当前的网络功能在固定的编程规则上很大程度上建立,并且缺乏支持更具表现力的学习模型的能力,例如使用神经形态计算的脑启发的认知计算模型。造成这种缺点的主要原因是基于TCAM基于TCAM的数字数据包处理器的巨大能源消耗和限制。在这项研究中,我们表明,来自模拟领域的最新新兴技术具有很高的潜力,可以以能效和表现力,所谓的认知功能支持网络功能。我们建立了一个名为Memristors的新技术,建立了一个模拟数据包处理架构。我们开发了一种新颖的模拟匹配性记忆,称为概率内容 - 可寻址内存(PCAM),用于支持确定性和概率匹配函数。我们开发了程序抽象,并显示了PCAM对基于队列管理的模拟网络功能的支持。对回忆录芯片的实验数据集的分析仅显示0。01 fj/bit/能量消耗的单元,用于响应模拟计算,比数字计算少50倍。
可靠性手册 - ADI 公司
ADI 公司始终高度重视提供满足客户总体要求的产品,从而实现客户完全满意 — 这对于当今集成电路行业的成功和生存至关重要。这是通过不仅在产品和工艺设计的所有领域,而且在制造过程中纳入质量和可靠性检查来实现的。这是通过在任何新开发或设备引入到我们的任何设施的设计阶段进行仔细规划,利用沟通和团队合作来实现的。ADI 公司坚信跨职能团队和个人贡献的必要性,以实现卓越的质量和可靠性。我们的员工致力于公司的质量和可靠性目标,并在全球范围内不断提高 ADI 公司工艺和服务的质量和可靠性。