XiaoMi-AI文件搜索系统
World File Search SystemBiman
Indo-French节点
09:15 AM- 09:45 AM“微流体人体生理肝模型作为药物诱导肝损伤的筛查平台”。教授。Biman B. Mandal,生物科学与生物工程系,IIT Guwahati
达卡国际机场运营数据收集调查
保税仓库狭窄(进出口均需要比现有空间平均宽3倍的空间)。 出口:卸货空间不足。公共区域严重拥挤。 进口:无法入库的货物,则放置在坡道附近的天棚下(非保税)露天。 比曼航空虽然垄断经营,待遇优厚,但在货运效率方面管理不善。 据说,由于集装器未固定或直接放置在地面上,过去3年内发生了3起集装器(ULD)直接撞击飞机的事故。 损害赔偿金基本由航空公司承担。 快递货物设施差。 应在保税仓库外设立长期无人认领的货物专用存储设施,以缓解拥挤。 出口保税仓库前的未预留货物应放置在机场外(另一个想法是在新保税仓库建成后将货物转移到旧保税仓库)。 保税货物不能存放在机场外,因为达卡还没有建立保税转运的概念。 海关官员短缺(一名官员每天处理数百起案件。总共有大约 20 名官员负责出口和进口)。此外,海关官员对 HS 编码的了解不足。 由于开门晚和午休时间长,海关办公室的实际办公时间不到六个小时,应该将这段时间分配给方便货物从仓库移出。 问题 出口和进口仓库的处理和存储空间都太窄。 比曼航空的工作人员在质量和快速处理方面不可靠,因为他们没有接受足够的基本培训,包括安全管理。 比曼航空与其他航空公司之间的损害索赔和损失合同对于比曼航空来说是单方面的。 一家电子商务企业计划使用快递服务;因此,需要适当的设施来增加未来对该业务的需求,并通过扩大航空贸易电子商务来发展国家。 保税转运的概念尚未建立。 海关官员短缺(总共只有约 20 名出口和进口官员)。 海关官员对 HS 编号的了解不足。 海关办公室的实际办公时间不到六个小时。 HS 编码:商品名称及编码协调制度 来源:JICA 研究小组
达卡国际机场运营数据收集调查
保税仓库空间狭窄(进出口均需要比现有空间平均宽3倍的空间)。 出口:卸货空间不足。公共区域严重拥挤。 进口:无法存放在仓库的货物,则无人看管地放置在坡道附近的顶棚下(非保税)。 虽然比曼航空是垄断企业,受到优待,但在货运效率方面管理不善。 据悉,由于未固定的ULD或直接放置在地面上的ULD,在过去3年中发生了3起直接撞击飞机的事故。 损害赔偿金基本由航空公司承担。 快递货物设施较差。 应在保税仓库外设立长期无人认领货物的指定存储设施,以缓解拥堵。 应将出口保税仓库前的未预留货物放置在机场外(另一个想法是,当新保税仓库建成时,将货物转移到旧保税仓库)。 保税货物不能存放在机场外,因为达卡没有建立保税转移的概念。 海关官员短缺(一名官员每天处理数百起案件。总共约有 20 名官员被分配到出口和进口)。此外,海关官员对 HS 编码的了解不足。 由于开门时间晚、午休时间长,海关办公室的实际办公时间不到六个小时,而这些时间应该分配给货物从仓库移出。问题 出口和进口仓库的处理和储存空间都太窄。 比曼航空的员工在质量和快速处理方面不可靠,因为他们没有接受足够的基本培训,包括安全管理。 比曼航空与其他航空公司之间的损害索赔和损失合同对于比曼航空来说是单方面的。 一家电子商务企业经营者计划使用快递服务;因此,需要适当的设施来增加未来对该业务的需求,并通过扩大航空贸易电子商务来发展国家。 保税转运的概念尚未建立。 海关官员短缺(出口和进口部门总共只有约 20 名官员)。 海关官员对 HS 编号的了解不足。 海关办公室的实际办公时间不到六个小时。HS 编码:统一商品描述和编码系统 来源:JICA 研究小组
节目安排
发言人/小组成员/专家 Biman Mandal (印度理工学院古瓦哈提分校) Nirmal Jayabalan (印度理工学院皮拉尼分校,海得拉巴) Neetu Singh (印度理工学院德里分校) Anil Kumar PR (Sree Chitra Tirunal Institute) Namrata Gundiah (印度理工学院班加罗尔分校) Aravind Kumar Rengan (印度理工学院海得拉巴分校) Gauri Balachandran (印度理工学院 BHU 分校) Falguni Pati (印度理工学院海得拉巴分校) Vineet Joshi (LVPEI 分校) Amit Asthana (NIPER 分校) Purvasha Narang (印度理工学院那格浦尔分校)
人工智能工程服务有限公司年度报告...
此外,贵公司过去曾与 22 家国际航空公司和 3 家国内航空公司签订了航线维护技术处理协议。今年,AIESL 与新国际航空公司(马来西亚航空有限公司、马汉航空、埃及航空、阿曼航空和孟加拉国比曼航空)签署了 SGHA(标准地面处理协议),负责航线维护。贵公司已获得 11 家外国民航局的批准,即卡塔尔、科威特、GACA(阿联酋)、新加坡民航局、斯里兰卡民航局、尼泊尔民航局、泰国民航局、马来西亚民航局、孟加拉国民航局和阿曼 PACA。AIESL 已申请埃及民航局的批准。
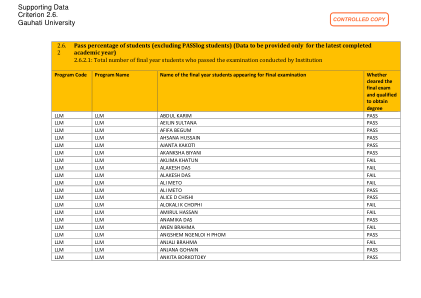
支持数据标准 2.6。高哈蒂大学
llm llm anupam deka通过llm aparna nath llm aChana Mech Fail Llm llm alunabh sarma sarma pass llm asif alam fail llm astha phukan Pass llm llm llm llm llm llm aswani aswani aswani aswani aswani karma Barkha Agarwal Pass Llm LLM Barlee Chiangchi D Sangma Pass Llm Beronika Das Fail LLM LLM Bhagyashree Baruah baruah llm llmval llmval llm llm llm bibha bibha rani barni barman barman barman pass llm llm llm biki llm llm llm llm llm llm llm llm llm llm llm Inong Rongphar Pass LLM LLM Burhan Uddin Lchurn Pass Llmhani LLM Prakash Agarwal Pass LLM LLM LLM Chitra Roy llm llm llm llm llm chitra llm llm llm llm llm llm llm