机构名称:
¥ 1.0
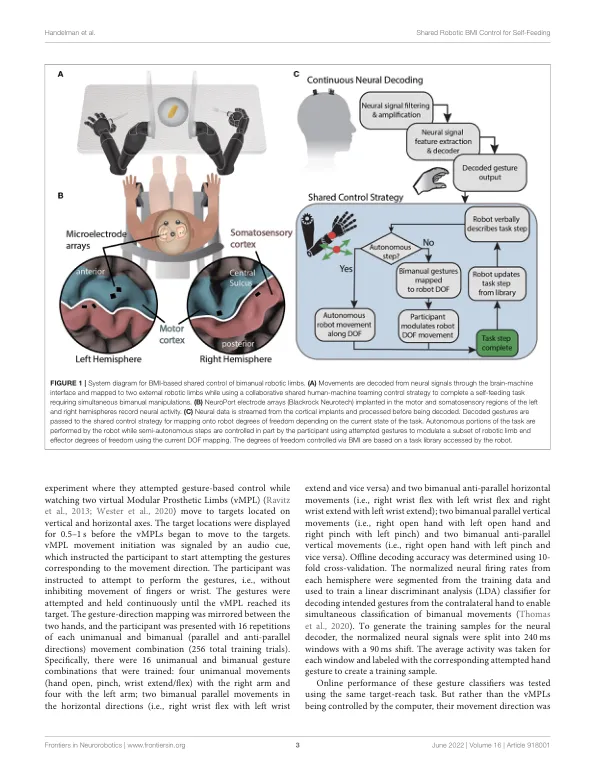
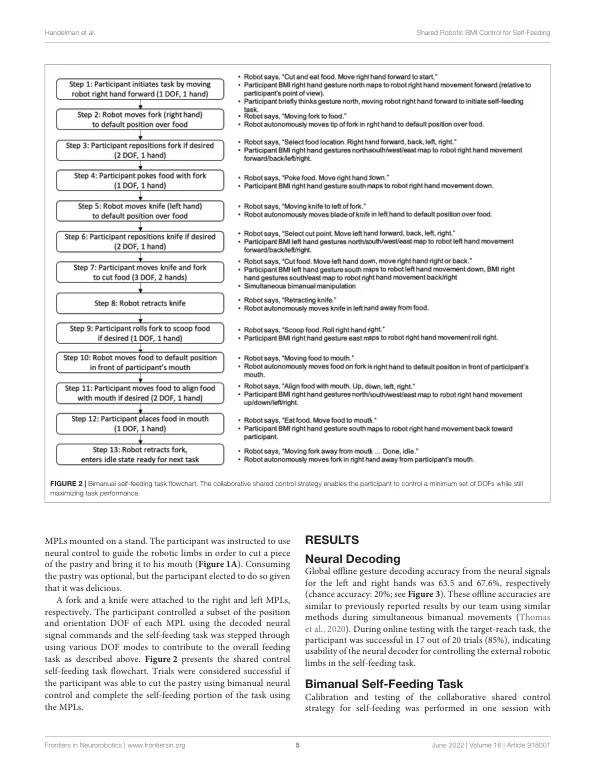
智能机器人系统和脑机接口 (BMI) 的进步帮助患有感觉运动障碍的个体恢复了功能和独立性;然而,由于通过用户输入以协调的方式控制多个肢体的多个自由度 (DOF) 的技术复杂性,需要双手协调和精细操作的任务仍然未得到解决。为了应对这一挑战,我们实施了一种协作共享控制策略来操纵和协调两个模块化假肢 (MPL) 以执行双手自我进食任务。一位在感觉运动大脑区域有微电极阵列的人类参与者向两个 MPL 发出命令来执行自我进食任务,其中包括双手切割。从双侧神经信号解码运动命令,以一次控制每个 MPL 上的最多两个 DOF。共享控制策略使参与者能够将其四自由度控制输入(每只手两个)映射到多达 12 个 DOF,以指定机器人末端执行器的位置和方向。通过使用神经驱动的共享控制,参与者成功同时控制了两个机械肢体的运动,从而在复杂的双手自主进食任务中切开和进食食物。通过 BMI 与智能机器人行为协作实现的双手机器人系统控制的演示对于恢复感觉运动障碍患者的复杂运动行为具有重要意义。
通过大脑实现双手机械臂的共享控制......
主要关键词


相关文件推荐