
机构名称:
¥ 1.0
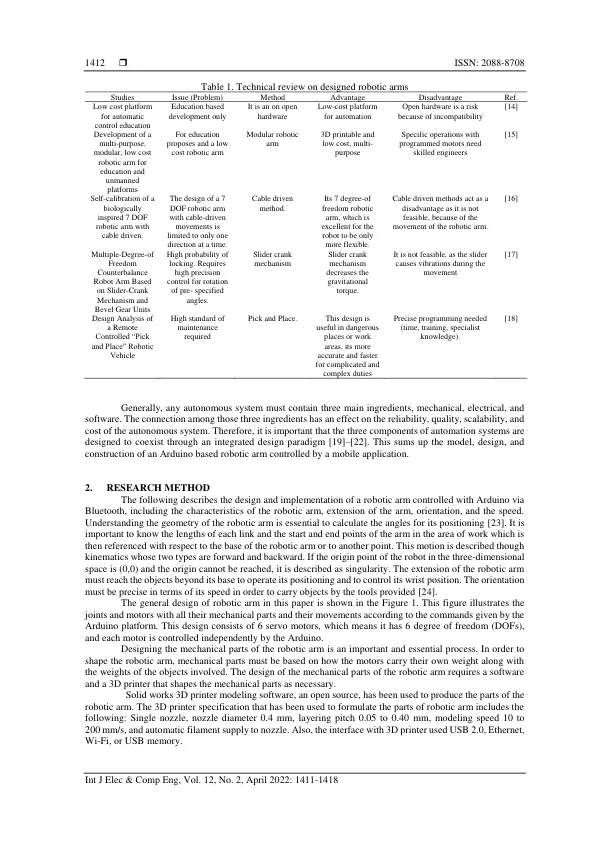
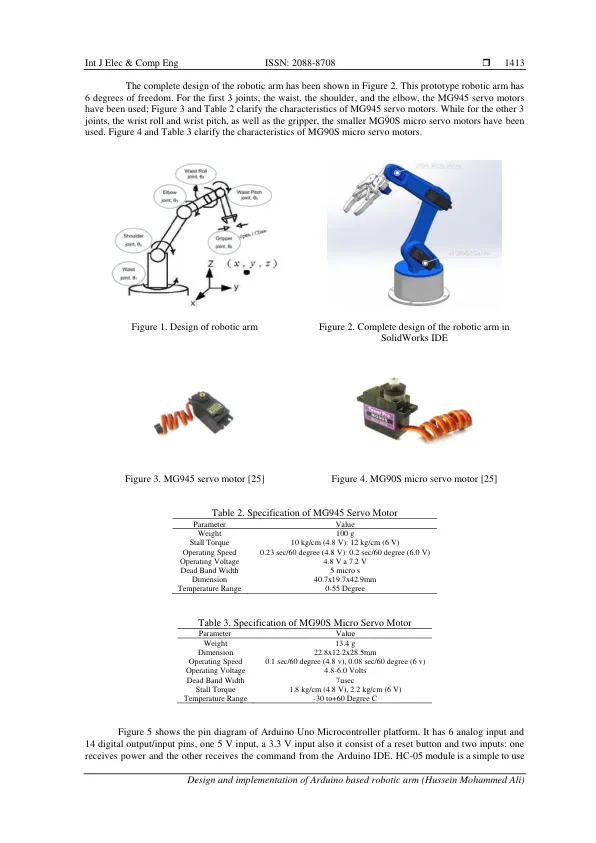
本研究介绍了基于 Arduino 的机械臂的模型、设计和构造,该机械臂通过移动应用程序控制,可在远距离运行。本研究设计并实现了一个六自由度机械臂。由 Arduino 平台控制的设计通过无线控制信号(即蓝牙)从用户的移动应用程序接收命令。机械臂由五个旋转关节和一个末端执行器组成,其中旋转运动由伺服电机提供。每个连杆首先使用 Solid Works 设计,然后通过 3D 打印机打印出来。机器人零件的组装和电机的机械形状产生了机械臂的最终原型。Arduino 已被编程为为每个相应的伺服电机提供旋转,以便在设计的移动应用程序中为滑块提供远程使用。
基于Arduino的机械臂设计与实现
主要关键词


相关文件推荐





























