XiaoMi-AI文件搜索系统
World File Search SystemCLIP

转导零射击和少量剪辑-CVF Open Access
转导的推论已通过几片图像分类进行了广泛研究,但在最近的,快速增长的文献中,有关适应视觉模型(如剪辑)的文献被完全忽略了。本文介绍了转换零射击和少量剪辑的分类,其中在其中共同进行推理,在一批无标记的查询样品中共同执行,而不是独立处理每个实例。我们最初构建了信息性的文本概率特征,从而在单元单元集中导致分类问题。受期望最大化(EM)的启发,我们基于优化的分类目标使用Dirichlet定律对每个类别的数据概率分布进行模型。然后使用一种新颖的块最小化最小化算法来解决最小化问题,该算法同时估计分布参数和类分配。在11个数据集上进行的广泛的Numerical实验强调了我们批处理推理方法的效果和效率。在带有75个样本的测试批次的零摄像任务上,我们的APARCH产量比Clip的零弹性性能提高了20%的ImageNet准确性。此外,我们在几次设置中胜过最先进的方法。代码可在以下网址提供:https://github.com/ segolenemartin/trandductive-clip。

clearclip:分解剪辑表示密集的视觉语言推理
摘要。尽管大规模预处理的视觉模型(VLM)尤其是在各种开放式播放任务中的剪辑,但它们在语义细分中的应用仍然具有挑战性,从而产生了带有错误分段区域的嘈杂分段图。在本文中,我们仔细地重新调查了剪辑的架构,并将残留连接确定为降低质量质量的噪声的主要来源。通过对剩余连接中统计特性的比较分析和不同训练的模型的注意力输出,我们发现剪辑的图像文本对比训练范式强调了全局特征,以牺牲局部歧视,从而导致嘈杂的分割结果。在响应中,我们提出了一种新型方法,该方法是分解剪辑的表示形式以增强开放式语义语义分割的。我们对最后一层介绍了三个简单的修改:删除剩余连接,实现自我关注并丢弃馈送前进的网络。ClearClip始终生成更清晰,更准确的绘制图,并在多个基准测试中胜过现有的方法,从而确认了我们发现的重要性。

DreamDiffusion:通过时间掩蔽信号建模和 CLIP 对齐实现高质量 EEG 到图像生成
摘要。本文介绍了 DreamDiffusion,这是一种直接从脑电图 (EEG) 信号生成高质量图像的新方法,无需将想法转化为文本。DreamDiffusion 利用预先训练的文本到图像模型,并采用时间掩蔽信号建模来预训练 EEG 编码器,以获得有效且稳健的 EEG 表示。此外,该方法进一步利用 CLIP 图像编码器提供额外的监督,以更好地将 EEG、文本和图像嵌入与有限的 EEG-图像对对齐。总体而言,所提出的方法克服了使用 EEG 信号进行图像生成的挑战,例如噪声、信息有限和个体差异,并取得了令人鼓舞的结果。定量和定性结果证明了所提方法的有效性,这是朝着便携式和低成本“思想到图像”迈出的重要一步,在神经科学和计算机视觉领域具有潜在的应用。
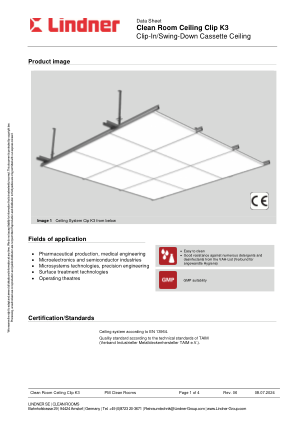
数据表 洁净室天花板夹 K3 夹入式/下摆式盒式天花板
盒式天花板采用粉末涂层天花板盒,按照欧洲标准和 TAIM 标准制造。Clip K3 天花板系统的特点是密封性高,易于清洁和消毒。符合 GMP 和 DIN EN ISO 14644 的设计。表面光滑、均匀,允许齐平安装,不含排气或颗粒发射材料。天花板接缝的密封性通过适合洁净室的密封实现。

可解释的 AI Holodeck 中的 CLIP 引导 3D 场景生成
简介文本到场景生成的一个主要挑战是生成多样化但又与用户输入保持相关的场景。 先前关于 3D 场景生成的工作主要集中于使用用户明确提到的对象或相关对象(而不考虑基础环境)的场景的可信度(Chang 等人,2015 年;Coyne 和 Sproat,2001 年)。 然而,虚拟场景也可以包含隐式对象(即通过常识与其他对象相关并从隐式场景知识中得出的对象(¨ Ohlschl¨ager 和 V˜o,2020))。 隐式对象可以通过特定于环境或特定于实例的知识收集,并且可以通过描绘多样化和人口密集的物理空间的真实感来提高生成场景的可信度。我们之前曾介绍过 AI Holodeck (Smith 等人,2021) 的初始阶段,这是一个使用通过带注释的数据集收集的环境特定知识从自然语言输入生成虚拟 3D 场景的应用程序。在本文中,我们介绍了 AI Holodeck 应用程序的新版本,它通过两个层次收集常识性知识。首先,如前一版本所示,带注释的图像数据集为系统提供了与用户明确定义的对象隐式相关的对象。其次,CLIP 引导 (Radford 等人,2021) 搜索从与用户输入相关的参考图像中提取对象及其空间关系。由于存在令人惊讶的隐式对象或其位置,这一添加也增加了我们系统对可解释性的需求。对于

评估新兴高熔点无铅焊料和混合烧结膏作为夹片封装连接材料的效果
摘要:高熔点(HMP)无铅焊料、混合烧结和瞬态液相烧结(TLPS)是有望替代高铅焊料的新兴无铅替代品。无铅焊料与现有的夹片键合封装高铅焊接工艺完全兼容。混合烧结的好处是它比无铅或高铅焊料具有更高的热导率和电导率。在本研究中,首先通过芯片剪切测试评估了十种材料(包括无铅焊料、混合烧结膏和 TLPS)。在初步材料筛选之后,两种无铅焊料(焊料 1 和 2)、两种混合银烧结膏(烧结 i 和 ii)和一种 TLPS 进行内部样品组装。对于无铅焊料,借助真空回流进行了工艺优化,以降低空洞率。由于银-铜烧结比银-银烧结扩散慢且不均衡,为增强混合银烧结,需进行优化,包括对芯片金属化进行银精加工,对引线框架的夹片和键合区域进行银电镀。在 0 小时封装电气测试中,焊料 1 和烧结 i 通过并送去进行可靠性测试,而焊料 2、烧结 ii 和 TLPS 分别因金属间化合物 (IMC) 开裂、材料渗出和芯片开裂而失败。在可靠性测试中,早期可行性研究定义了热循环 (TC) 1000 次、间歇工作寿命 (IOL) 750 小时和高加速温湿度应力测试 (HAST) 96 小时的基本方案。75 个烧结 i 单元中有 1 个在 TC 1000 次循环中失败,原因是银烧结结构和芯片底部金属化之间的分离。焊料1无缺陷地通过了基本方案,接下来需要将材料的可加工性和夹持强度提高到与高铅焊料相当的水平。
用于威胁分析的多模态学习 - Chalmers ODR
近年来,多模态领域在计算机视觉领域引起了极大的兴趣,它已被证明非常强大,可以让模型从原始文本而不是手动注释中学习视觉概念。使用这一概念的一个特定模型是 CLIP [1],它在一般的零样本图像分类任务中表现出了最先进的性能。然而,很少有研究探讨 CLIP 在专门任务中的竞争力。为了填补这一空白,本报告探讨了 CLIP 模型是否可以使用从社交媒体收集的威胁相关数据成功地适应安全情报领域,同时使用与原始文章相同的训练任务。此外,我们还探讨了 CLIP 的图像文本对齐功能如何用于多模态事件分类。除了传统的监督方法(其中 CLIP 用于特征提取)之外,我们还提出了一种使用 CLIP 的零样本功能进行事件分类的新方法。我们的微调模型和预训练的 CLIP 模型并行用于这两种方法,以比较性能。我们的结果表明,CLIP 可以在社交媒体数据上成功进行微调,其零样本图像标题匹配能力提高了 2%。此外,我们还表明,我们的新方法实现了 22% 的 AUC 得分,而传统方法实现了 74% 的 AUC 得分,这导致我们得出结论,使用 CLIP 的先天零样本能力进行事件分类需要
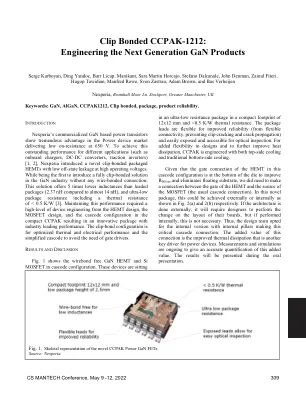
夹式粘合 CCPAK-1212:设计下一代 GaN 产品 Serge Karboyan、Ding Yandoc、Barr Licup、Manikant、Sara Martin Horcajo、Stefano
夹片键合 CCPAK-1212:设计下一代 GaN 产品 Serge Karboyan、Ding Yandoc、Barr Licup、Manikant、Sara Martin Horcajo、Stefano Dalcanale、John Denman、Zainul Fiteri、Hagop Tawidian、Manfred Rowe、Sven Zastrau、Adam Brown 和 Bas Verheijen Nexperia,Bramhall Moor Ln,斯托克波特,大曼彻斯特,英国 关键词:GaN、AlGaN、CCPAK1212、夹片键合、封装、产品可靠性。 引言 Nexperia 的商业化 GaN 基功率晶体管在功率器件市场表现出巨大优势,在 650 V 时提供低导通电阻。为了在不同应用(如车载充电器、DC-DC 转换器、牵引逆变器)[1、2] 中实现这种出色性能,Nexperia 推出了一种新型夹片键合封装 HEMT,在高工作电压下具有低关断态漏电。虽然这是 GaN 行业中第一个推出完全夹片键合解决方案而不需要任何引线键合连接的解决方案,但该解决方案的电感比引线封装低 5 倍(2.37 nH 对比近 14 nH),并且封装电阻超低,热阻小于 0.5 K/W [3]。要保持这种性能,需要高水平的器件工程设计,包括 HEMT 设计、MOSFET 设计以及紧凑型 CCPAK 中的共源共栅配置,从而形成具有行业领先性能的创新封装。夹片键合配置用于优化热性能和电气性能,简化的共源共栅可避免使用栅极驱动器。结果与讨论图 1 显示了共源共栅配置中的无引线键合 GaN HEMT 和 Si MOSFET。这些器件位于
![arXiv:2501.07085v1 [quant-ph] 2025 年 1 月 13 日](/simg/f\f8c4a3482ac030d9dbe0a2f5baacd985075c8d1c.webp)
arXiv:2501.07085v1 [quant-ph] 2025 年 1 月 13 日
计算策略比率 rt ( ˆ θ ) = π ˆ θ ( at | st ) π ˆ θ old ( at | st ) 计算裁剪目标 L CLIP ( ˆ θ ) = E th min rt ( ˆ θ ) ˆ At , Clip( rt ( ˆ θ ) , 1 − ϵ, 1 + ϵ ) ˆ A ti

双曲线图像文本表示 - arXiv
基线。我们主要与 CLIP(Radford 等人,2021 年)进行比较,后者在欧几里得空间中的单位超球面上嵌入图像和文本。CLIP 使用 4 亿个图像-文本对的私有数据集进行训练。一些后续工作重新实现了 CLIP 并使用可公开访问的数据集,如 YFCC(Thomee 等人,2016 年)、概念标题(Changpinyo 等人,2021 年;Sharma 等人,2018 年)和 LAION(Schuhmann 等人,2021 年;2022 年);值得注意的例子是 OpenCLIP(Ilharco 等人,2021 年)、SLIP(Mu 等人,2022 年)、DeCLIP(Li 等人,2022 年)和 FILIP(Yao 等人,2022 年)。我们开发了 CLIP 基线并使用单个公共数据集 RedCaps(Desai 等人,2021 年)对其进行训练,以便于重现。我们最小的模型使用 8 × V100 GPU 在不到一天的时间内进行训练,并且明显优于最近使用 YFCC(Mu 等人,2022 年)的 CLIP 重新实现。