XiaoMi-AI文件搜索系统
World File Search SystemCentroid
使用边缘检测从 LiDAR 中提取建筑物
Error 500 (Server Error)!!1500.That’s an error.There was an error. Please try again later.That’s all we know.
使用边缘检测从 LiDAR 中提取建筑物
图 1:激光扫描 ................................................................................................................ 7 图 2:LiDAR 多重回波 .......................................................................................................... 8 图 3:Sobel 边缘检测核 ................................................................................................ 11 图 4:拉普拉斯算子 ............................................................................................................. 11 图 5:高级方法 ............................................................................................................. 21 图 6:植被遮罩过程 ............................................................................................................. 23 图 7:DEM 差异 ............................................................................................................. 25 图 8:旋转最小/最大核 ............................................................................................................. 26 图 9:最小/最大 1 X 3 旋转核结果 ............................................................................. 27 图 10:使用植被遮罩从边缘检测结果中去除植被 ................................................................................................................ 28 图 11:足迹构建过程 ............................................................................................................. 30 图 12:二进制最小/最大栅格...........................................................


医疗 VR 训练模拟器中的评分和评估...
摘要 本研究提出并评估了虚拟现实 (VR) 训练模拟器的评分和评估方法。VR 模拟器可捕获详细的 n 维人体运动数据,这些数据可用于性能分析。开发了定制的医疗触觉 VR 训练模拟器,并用于记录来自 271 名具有多种临床经验水平的受训者的数据。提出了 DTW 多元原型 (DTW-MP)。VR 数据被分为新手、中级或专家。用于时间序列分类的算法的准确率为:动态时间规整 1-最近邻 (DTW-1NN) 60%,最近质心 SoftDTW 分类 77.5%,深度学习:ResNet 85%,FCN 75%,CNN 72.5% 和 MCDCNN 28.5%。专家 VR 数据记录可用于指导新手。评估反馈可以帮助受训者提高技能和一致性。动作分析可以识别个人使用的不同技术。可以实时动态检测错误,发出警报以防止受伤。
“阻力” - “螺旋桨” 的描述 - TU Delft 存储库
等效附加系数 (-) CAPPSUM[capp(i)*sapp(i)]/SUM[sapp(i)] 轴支架 : capp(i) 3.0 尾鳍 : capp(i) 1.5-2.0 支柱凸台 : capp)i) 3.0 船体凸台 : capp(i)= 2.0 轴 : capp(i) 2.0-4.0 稳定鳍 : capp(i) 2.8 圆顶 : capp(i)= 2.7 舭龙骨 : capp(i) 1.4 CAPP 球鼻艏横截面积 (m2) ABULB 球鼻艏横截面积质心至龙骨 (m) HBULB 艏侧推器隧道直径 (m) 艏侧推器数量 : DBTTDBTT*sqrt(N) ..DBTT 船首侧推器隧道阻力系数 船首圆柱形部分的推进器:CBTT-0.003 最差位置的推进器:CBTT-0.012 CBTT 浸没横梁面积(m2) AT 运行长度(m)(如果未知 SLR-0)。。SLR 水线入口角(如果。未知 0 度)--ALFA 螺旋桨数量:0-2,如果<>0 计算。W、T、RRE NPROP

Khronos:时空度量的统一方法 -
图1:我们提出了Khronos,这是一种在动态环境中执行指标同时映射和定位(SLAM)时,是一种统一的推理方法,以推理短期动态和长期变化。上面显示了始终代表场景状态的Khronos时空图中的一些实例。短期动力学(左)显示在洋红色中,并与相应时间间隔内观察到的人类作用进行了比较。我们显示了检测到的移动点以及质心轨迹周围的电流和初始边界框。检测到人类和无生命的物体(例如购物车(左下))。长期更改(右)显示了同一场景的三个时间实例。最早的实例是时间0:20(右上角)。机器人在走廊上移动时,卸下椅子,并将红色冷却器放在桌子的顶部;这些更改被检测到机器人重新访问,并在时间1:52(右下)关闭循环。最后,再次将冷却器卸下,该机器人在时间3:35检测到。

加速框架中量子波包的断层扫描描述
摘要:研究加速框架中单个量子粒子(即量子波包)的层析成像。我们在移动参考系中写出薛定谔方程,其中加速度在空间中均匀分布,并且是时间的任意函数。然后,我们将这个问题归结为在存在均匀力场但具有任意时间依赖性的情况下,惯性框架中波包的时空演化研究。我们证明了高斯波包解的存在,其中位置和动量不确定性不受均匀力场的影响。这意味着,与无力运动的情况类似,不确定性乘积不受加速度的影响。此外,根据埃伦费斯特定理,波包质心根据粒子受到均匀加速度影响的经典牛顿定律移动。此外,与自由运动一样,波包在配置空间中表现出衍射扩散,但在动量空间中则没有。然后利用Radon变换确定加速框架中高斯态演化的量子断层扫描图,最后利用相关断层扫描空间中的光学和单纯形断层扫描图演化来表征加速框架中的波包演化。
关于使用高斯分布之间的测地三角形解决分类问题
本文提出了一种新的一阶和二阶统计数据分类框架,即均值/位置和协方差矩阵。在过去十年中,已经提出了几种协方差矩阵分类算法。它们通常利用对称正定矩阵 (SPD) 的黎曼几何及其仿射不变度量,并在许多应用中表现出色。然而,它们背后的统计模型假设了零均值。在实践中,它通常在预处理步骤中被估计然后被删除。这当然会对均值作为判别特征的应用造成损害。不幸的是,均值和协方差矩阵的仿射不变度量相关的距离仍然未知。利用以前关于测地三角形的研究,我们提出了两个使用这两种统计数据的仿射不变散度。然后,我们推导出一种计算相关黎曼质心的算法。最后,将基于散度的最近质心应用于农作物分类数据集 Breizhcrops,显示了所提框架的趣味性。

对扫描规划和多技术融合对点云数据收集对注册和数据质量的效果的定量调查:邦德大学可持续建筑的案例研究
摘要:建筑行业需要用于各种应用程序,包括建筑物翻新,历史建筑保存和结构健康监测,需要全面,准确的信息。现实捕获技术促进了点云的形式记录本构建的信息。但是,在研究中,扫描计划和多技术融合的新兴发展趋势在研究中尚未充分解决有关它们对建筑环境中云云注册质量和数据质量的影响的研究。本研究旨在广泛研究扫描计划和多技术融合对点云注册和数据质量的影响。使用注册误差(RE)和扫描重叠率(SOR)评估了注册质量,分别代表注册准确性和注册率。相反,使用点误差(PE)和覆盖率(CR)评估数据质量,这表示数据的准确性和数据完整性。此外,本研究提出了一种体素质心方法和PCP速率来计算和优化CR,从而应对量化点云完整性的行业挑战。
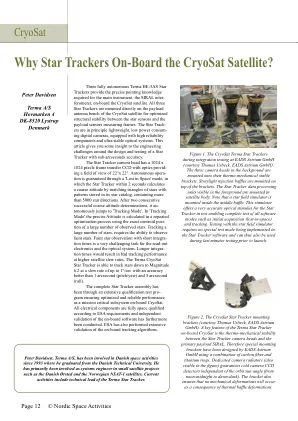
为何 CryoSat 卫星上配备星体追踪器?
1024 像素帧传输 CCD,光学元件提供 22°x 22° 的视野。通过“迷失太空”模式保证自主操作,在该模式下,星体跟踪器在 2 秒内通过将星星的三角形与存储在其星表中的图案进行匹配来计算粗略姿态,其中包含 5000 多个星星方向。连续两次成功确定粗略姿态后,它会自动跳转到“跟踪模式”。在“跟踪模式”下,使用大量观测恒星的精确质心位置,通过重复优化过程计算出精确的姿态。跟踪大量恒星需要能够观察暗淡的恒星。对于读出电子设备和光学系统来说,在短积分时间内观测暗星是一项非常具有挑战性的任务。较长的积分时间会导致卫星旋转速率较高时跟踪性能不佳。Terma CryoSat 星跟踪器能够以高达 1°/秒的旋转速率跟踪低至 6.2 等的恒星,精度优于 1 角秒(俯仰/偏航)和 5 角秒(滚动)。