机构名称:
¥ 1.0
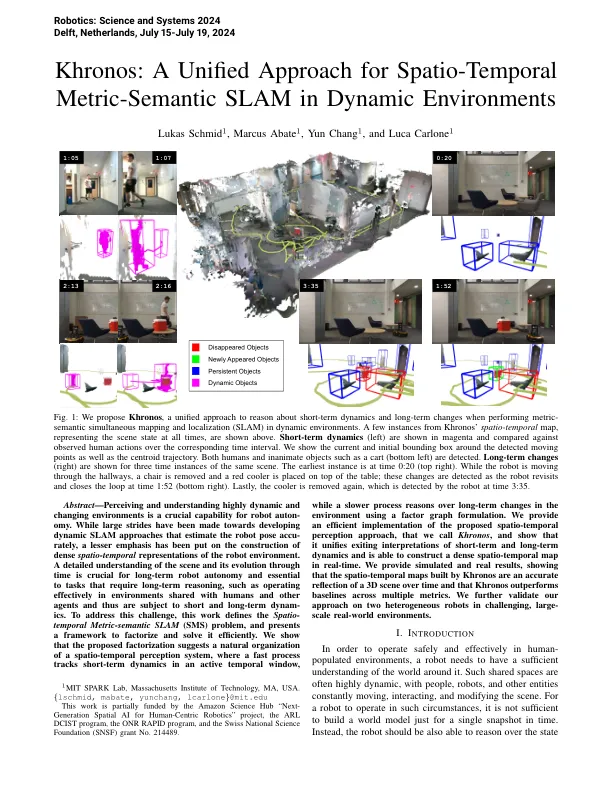
图1:我们提出了Khronos,这是一种在动态环境中执行指标同时映射和定位(SLAM)时,是一种统一的推理方法,以推理短期动态和长期变化。上面显示了始终代表场景状态的Khronos时空图中的一些实例。短期动力学(左)显示在洋红色中,并与相应时间间隔内观察到的人类作用进行了比较。我们显示了检测到的移动点以及质心轨迹周围的电流和初始边界框。检测到人类和无生命的物体(例如购物车(左下))。长期更改(右)显示了同一场景的三个时间实例。最早的实例是时间0:20(右上角)。机器人在走廊上移动时,卸下椅子,并将红色冷却器放在桌子的顶部;这些更改被检测到机器人重新访问,并在时间1:52(右下)关闭循环。最后,再次将冷却器卸下,该机器人在时间3:35检测到。
Khronos:时空度量的统一方法 -
主要关键词

相关文件推荐