XiaoMi-AI文件搜索系统
World File Search SystemCubesat

大学卫星的仪器-Cubesat
自从十五世纪初的哲学家和思想家一直想知道太空带来的奥秘,例如它们的性质和扩展,使他们对天体力学,应用数学和自然科学的相关领域做出了巨大贡献。随着技术和计算进步提供的科学进步,已经开发了新的空间应用技术,开始了空间探索的时代。由于电信,空间观察卫星的进展以及通过图像进行土地监测,世界航空航天部门开始发展,并激励建立与部门相关的身体。如巴西的例子,引用了目前被提名INPE的Gocnae(国家太空活动委员会组织)(国家空间研究所)[3]的概念[3]。这一事件偏爱大学,以方形山脉的形式进入太空竞赛,卫星的初始测量为10 x 10 x 10 cm,质量为1,33 kg,其特征是该利基市场的卫星测量。因此,立方体在学习和接触不同程度的教育的学生中表现出了重要的重要性,以便在航空航天部门进行研究。[2,7,8]。作为项目开发的开端,文献综述和对项目最初充足性的传感器进行研究。这项工作的目的是卫星大学建设和仪器的步骤,涵盖编程区域,添加剂制造[4,5],电子,嵌入式系统和天体力学[1,6]。加速度计和陀螺仪分别提供线性加速度和角速度,磁力计和气压计分别提供指导(指南针)和大气压(高度计),而GPS受体则提供位置和速度信息。每个传感器的数据将通过Cubesat MicroController处理,该数据将通过射频发送器传输处理的数据。这些传感器的主要特征是低成本,较小的物理尺寸和低功耗,这是将电池用作主要能源的应用的重要因素。因此,立方体将能够测量通过GY-280传感器获得的温度,压力和高度。另外,由于使用GPS,陀螺仪和加速度计系统,其沿轨迹的位置描述沿轨迹进行,定位和空间方向。然后,GY-521提供的数据和µT单元中的磁场测量值开始了系统的整合,因此您可以尝试进行步骤,以便更好地利用时间,并离散涉及的步骤,从而促进项目每个阶段可能误差。
用于地球观测和天文光学成像的 6U CubeSat 可部署望远镜
立方体卫星等纳米卫星的可用体积对望远镜直径施加了物理限制,限制了可实现的空间分辨率和光度测定能力。例如,12U 立方体卫星通常仅具有足够的体积来容纳直径为 20 厘米的单片望远镜。在本文中,我们介绍了可部署光学器件的最新进展,该器件可在 6U 立方体卫星中容纳直径 30 厘米以上的望远镜,其中 4U 的体积专用于有效载荷,2U 的体积专用于卫星总线。为了达到这种高紧凑度,我们在发射时折叠主镜和次镜,然后在空间中展开和对齐。通过控制每个镜段的活塞、倾斜和倾斜,可实现可见光谱部分的衍射极限成像质量。在本文中,我们首先描述整体卫星概念,然后报告有效载荷的光机设计以部署和调整镜子。最后,我们讨论了主镜的自动相位控制,以控制望远镜的最终光学质量。

Redalyc.可持续设计纳米卫星结构类型立方体卫星作为测试的模块化平台
摘要:本文旨在促进专有技术的开发以及对技术应用过程所必需的航空航天概念研究中的集成技术的评估和选择。所要解决的问题在于缺乏模块化平台和低成本测试系统,无法进行卫星系统的实验开发和模拟。因此,与此相比,提出了 1U CubeSat 标准的可扩展模块化平台的提案作为主要结果。从可持续性概念出发提出的设计和特性描述过程有助于使用和开发低成本设备,最大限度地减少对环境的影响,进而切实可行地将其应用于促进哥伦比亚空间技术传播的团体和研究中心的活动中。可持续设计的方法、设计原则的定义和概念设计,通过应用质量功能部署方法 (qfd)、发明问题解决理论 (triz)、可制造性导向设计 (DfM)、可装配性 (DfA)、环境影响 (DfE)、可靠性 (DfR) 和安全性评估来实现,这些对于遵守 cds 中描述的 CubeSat 操作标准都至关重要。最后,提出了几种使用不同材料的低成本测试平台的构造模式,例如纸、abs、mdf 木材和铝的 3D 原型。它们都是以低成本设计和建造的小型卫星结构。这些设计使测试机载系统和组装和材料集成阻力成为可能,在实验室中用作振动试验台,供有兴趣促进空间技术发展的研究团体或公司使用。

采用紧凑型光学有效载荷技术的 ESA IOD 立方体卫星任务概述
• 地球观测应用(EO 程序): – 用于公共卫生和昼夜循环气候变化的高分辨率大气监测 => 紧凑型痕量气体光谱成像、微型激光雷达 – 用于天气预报的全球对流层测量 => GNSS 无线电掩星接收器、微波辐射计、Ka 波段降水雷达 – 用于海洋监测的全球海况和冰层测量 => GNSS 反射测量接收器、Ka 波段雷达测高 – 陆地、洪水、火灾隐患的变化检测 => 多光谱和高光谱光学成像(VIS/SWIR/TIR)、SAR 和 AI 软件

尼泊尔 Danfe 太空任务:3U 立方体卫星技术演示任务
联合国开发计划署将尼泊尔列为受气候变化影响第四大的国家。全球变暖已导致 40 多个冰川湖随时可能溃坝。一些早期预警系统已经到位,但通过地面蜂窝网络连接。相反,地对空监测系统可以帮助可靠地阻止冰川湖溃坝洪水。本文概述了尼泊尔 Danfe 太空任务在 3U 立方体卫星上部署的此类系统。Danfe 演示了移植 PX4 无人机操作系统的第一个用例以及集成 LoRa 的 STM32 卫星片上系统。带有超声波传感器和 LoRa 的地面传感器终端将冰川水位数据发送到太空。如果演示成功,未来用于监测冰川的卫星星座可以在更短的时间内生产出来,因为硬件和软件都大大简化了。这样的星座可以提供近乎实时的水位数据,同时激发行动以防止任何即将发生的山洪暴发。

新型 3U 独立立方体卫星架构,用于自主近地小行星飞行
摘要:本研究旨在提出一种新型立方体卫星架构,旨在探索近地小行星。小型卫星商用现货技术的快速发展是过去十年航天工业的特点,利用这一特点设计出一款 3U 立方体卫星,能够提供足以改善目标小行星数据集的基本科学回报。概述了每个子系统的当前可用技术,然后根据任务约束选择组件。首先介绍典型的小行星飞行任务以及系统和性能要求。然后严格分析每个特征子系统,并提出建议的配置,表明仅在 3.9 千克湿重和 385 米/秒总 ∆ V 范围内即可实现任务可行性。
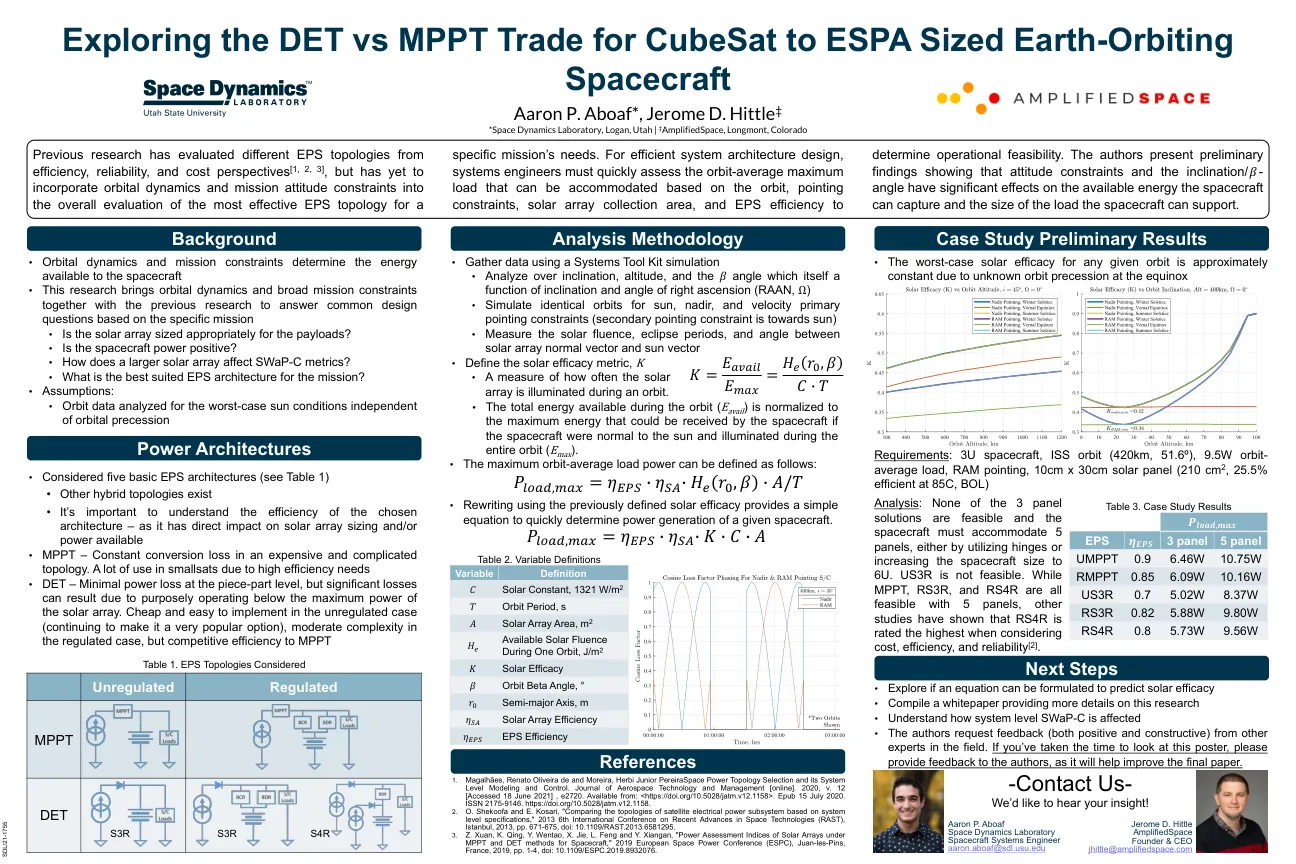
探索立方体卫星与 ESPA 大小的地球轨道航天器的 DET 与 MPPT 交易
1. Magalhães, Renato Oliveira de 和 Moreira, Herbi Junior Pereira 空间电源拓扑选择及其系统级建模与控制。《航空技术与管理杂志》[在线]。2020 年,第 12 卷 [2021 年 6 月 18 日访问],e2720。可从以下网址获取:。2020 年 7 月 15 日电子出版。ISSN 2175-9146。https://doi.org/10.5028/jatm.v12.1158。2. O. Shekoofa 和 E. Kosari,“基于系统级规范比较卫星电力子系统的拓扑结构”,2013 年第 6 届空间技术最新进展国际会议 (RAST),伊斯坦布尔,2013 年,第 671-675 页,doi:10.1109/RAST.2013.6581295。 3. Z. Xuan、K. Qing、Y. Wentao、X. Jie、L. Feng 和 Y. Xiangan,“MPPT 和 DET 方法下航天器太阳能电池阵列的功率评估指标”,2019 年欧洲空间电力会议 (ESPC),法国胡安莱潘,2019 年,第 1-4 页,doi:10.1109/ESPC.2019.8932076。

用于太空激光通信的微型立方体卫星 2-W EDFA 的开发和太空认证
摘要:日本国家信息通信技术研究所 (NICT) 目前正在为立方体卫星开发高性能激光通信终端,旨在为需要从轨道传输大量数据的低地球轨道卫星提供高数据速率通信解决方案。通信系统的一个关键部分是高功率光放大器,它能够为传输的信号提供足够的增益,以便能够在对立方体卫星平台的能量和功率影响最小的情况下关闭其对应接收器上的链路。本文介绍了与立方体卫星外形尺寸兼容的小型化 2-W 空间级 2 级掺铒光纤放大器 (EDFA) 的开发,据作者所知,它显示了空间合格 EDFA 的最佳功率与尺寸比。介绍了在实际条件下以及完整的空间鉴定和测试下的性能结果,证明该模块可以支持短时间低地球轨道地面下行链路以及长时间卫星间链路。

由太阳能帆船技术提供动力的第一个星际立方体的研究和早期开发的研究
Svarog Project是一项学生主导的计划,旨在使用太阳能航行到达Heliopause [1]。帆设置为被动稳定,与以前的星际任务不同,不需要重力助攻,从而使深空探索更加可行和灵活。已经进行了以前的可行性研究,证明了任务的潜力并突出了研究重点。已经开发了一种高保真轨道模型,以证明轨迹的可行性和研究初始条件。目前,正在实施科学机器学习[2],以研究对系统属性的最佳初始条件,参数和轨迹的敏感性。初始研究表明,逃逸轨迹对于质量与面积比为12 g m -2是可行的。鉴于反复的近距离传递给太阳,任务的持续时间以及其对太阳事件的敏感性,在任务期间理解和建模太空环境至关重要。到目前为止,已经进行了使用GRAS [3]与数据驱动的太阳能电位模型相结合的航天器接收的辐射剂量的初步模拟。使用多粒子模型的内部代码的结构模拟已与商业软件包进行了比较,并与真空室测试配对以进行验证。在Ikaros团队研究和分析[4]之后,我们现在已经开发了非二维分析,该分析将使帆动力学缩放以减少所需的模拟数量,并能够在重力影响下对帆行为进行实验验证。机械和电子设计以及原型制作与研究的努力并行进行。这些已经使部署方法和通信体系结构进行了测试。正在与飞行经过证明的旋转方法并行研究电动机控制的繁荣部署[5]。如果这些技术成功,SVAROG系统可以作为测试新技术和研究机会的低成本推动力,对行星际任务的越来越多以及促进了深空探索。
MOVE-III:用于探测低地球轨道亚毫米级空间碎片和流星体的立方体卫星
慕尼黑轨道验证实验 (MOVE) 是一个立方体卫星学生项目,由慕尼黑工业大学火箭和太空飞行科学工作组负责。MOVE-III 是正在开发的第四颗立方体卫星,也是 MOVE 项目的第一个 6U 任务,将在轨道上搭载专门的科学有效载荷。该任务旨在获取低地球轨道亚毫米空间碎片和流星体的现场观测数据,目的是汇编一套通量数据集,以及物体质量和速度测量数据,可用于验证空间碎片模型的小物体估计值,并支持与空间环境特性相关的进一步研究。MOVE-III 立方体卫星采用 MOVE-BEYOND 平台,计划搭载三个碎片密度检索和分析 (DEDRA) 等离子体电离传感器。初步设计评审已于 2022 年初完成,下一个里程碑是关键设计评审,计划于 2023 年完成。本文阐述了任务的科学目标和预期的数据产品,概述了探测器的工作原理,并介绍了整个系统架构、平台配置和子系统交互。此外,还讨论了任务碎片减缓方面的考虑因素。