XiaoMi-AI文件搜索系统
World File Search SystemCubesats

Milani 使命 - IRIS Re.Public@polimi.it
引言 太阳系中的小天体代表着当今太空探索的前沿。 各种任务例如罗塞塔号 [ 1 ]、隼鸟 1 号 [ 2 ] 和隼鸟 2 号 [ 3 ] 以及奥西里斯-雷克斯 [ 4 ] 都已向这些目标发射,而其他任务也计划在未来执行 [ 5, 6 ]。 当到达小天体附近时,深空立方体卫星具有多样化和补充大型航天器任务的优势 [ 7 ]。 事实上,一旦主航天器到达目标,它们就可以被用作机会性有效载荷,部署在现场。 NASA 和 ESA 之间的 AIDA (小行星撞击和偏转评估) 合作就是一个例子,旨在研究和描述与 Didymos 小行星系统的撞击 [ 8 ]。作为此次合作的一部分,NASA 发射了 DART(双小行星重定向测试)动能撞击器航天器 [9],LICIACube 将于 2022 年秋季对其与次级小行星 Didymos 的撞击进行观测和表征 [10]。作为此次合作的一部分,ESA 将于 2024 年 10 月发射 Hera 任务 [6],同时发射两颗深空立方体卫星,分别是 Juventas [11] 和 Milani [12-14],以研究和表征该系统。2027 年 1 月 Hera 抵达后不久,在 20 到 30 公里的距离之间将进行早期表征阶段,旨在确定天体的形状和重力场。随后将在约 10-20 公里的距离处进行详细表征阶段。在此阶段,两颗立方体卫星将从 Hera 母舰上释放,增强任务的科学回报。 Juventas 将配备单基地低频雷达和加速度计,而 Milani 将携带 ASPECT [ 15 ] 可见光和近红外成像光谱仪以及 VISTA 热重仪 [16],以表征小行星周围的尘埃环境。自主光学导航 (OpNav) 是现在和未来探索任务的一项使能技术。这种技术利用图像处理 (IP) 方法提取一组光学可观测量,用于生成具有相关不确定性的状态估计。这种估计通常通过滤波获得,滤波将来自动力学的信息与观察模型相结合,以实现比单独应用 IP 高得多的精度。由于可以使用低成本和低质量的传感器在机载以低成本生成图像,因此 OpNav 的机载应用越来越受到关注。这对于立方体卫星任务尤其重要,因为立方体卫星任务通常在质量和功率方面受到严格限制。在接近小型飞机的情况下,可以利用 OpNav 通过允许自主操作和解锁执行关键操作的能力来降低运营成本。通过将 OpNav 功能与制导和控制算法相链接,在不久的将来,可以预见自主 GNC 系统将出现在自主探索任务中,届时将减少或完全消除人类在环。在这项工作中,我们首次介绍了 Milani 任务基于 OpNav 的 GNC 系统的主要特征,以及任务状态的最新概述。本文的其余部分组织如下。第二部分提供了 Milani 任务的一般概述。第三部分详细介绍了 Milani 的 GNC 系统。从第三部分 A 中的 IP 开始,然后是第三部分 B 中的导航和第三部分 C 中的制导和控制。最后介绍 Milani 的 GNC,简要概述了该系统的初步设计

soa-摘要-2023.pdf
本报告概述并评估了截至 2023 年 9 月公开可用的最先进的小型航天器技术。技术成熟和小型化继续扩展小型航天器的能力,从而催生出更复杂的 SmallSat 任务设计。这些改进的功能扩大了常见的 SmallSat 平台,包括更大的立方体卫星和更小的 SmallSat;传统的 1U 和 3U 体积的立方体卫星平台现在包括高达 16U 的外形尺寸,曾经设计为 <400 公斤的 SmallSat 现在 <100 公斤,具有类似的能力,但成本更低。功能更强大的 SmallSat 平台的表面积更大,可以配备更多的太阳能电池板和子系统布置选项。SmallSat 行业正在跳出固有的思维模式,以最大限度地利用整个航天器体积,并设计日益复杂的未来 SmallSat 任务。


智能视频引导传感器 (SVGS)
概述 • 智能视频制导传感器 (SVGS) 专为资源受限系统(例如立方体卫星、小型卫星、小型着陆器)而设计,是高级视频制导传感器的一种低质量、低成本 COTS 实现,专为会合近距操作和捕获 (RPOC);进入、下降和着陆 (EDL)、舱内导航和 GPS 拒绝导航而设计。 • 使用摄像头捕获图像并使用摄影测量技术分析目标航天器上发光标记的模式,以确定范围和相对方向(6DOF 状态)。 • 可用于业余级(例如 Raspberry Pi、Android)和高端平台(例如 Xilinx US+MPSoC)。 • 在 Linux、FreeRTOS 和 Android 中的软件实现。 • 传感器范围可根据目标配置定制。 • 预计 SVGS 飞行装置的 SWaP: – 尺寸:8.5x6.5x4.5cm – 重量:250g – 功率:5W 摄像头 + 5W 目标

紧凑的激光通信终端体系结构和轨道演示
卫星由于要求的有效载荷的要求而产生的数据比以往任何时候都要多,尽管往往地球(DTE)的数据速率没有经历相同的增长。紧凑的激光通信终端是一项有前途的技术,它将增加带宽(10 GBIT+),并为传输较大的数据量铺平道路,这将增加小型和立方体在空间数据中作为服务产品的相关性。Orbit示威者的目标是针对1000公里的范围为1 GBIT/s的下行链路数据速率。使用1545nm的下行链路波长,而1590nm则用于接地站信标。PRB23序列将从轨内部末端传输到荷兰的地面站。在轨内实验中,将尝试从其他机上有效载荷中获取有效载荷数据,并将这些数据转发到地球上。这将为可能的未来增强功能提供宝贵的见解。

Vega C:通过合作伙伴关系增加协同作用...
矿石和更多的立方体正在进入太空,而太空的民主化正在加速。确保所有人都可以真正进入,包括非空间国家,联合国外在航天局(UNOOSA)(UNOOSA)和意大利公司Avio S.P.A.为联合国成员国提供了利用Vega C Launcher的机会。Vega C计划是在所有计划的卫星开发轨道下进行的动手机会,它为Vega C Launcher上的所有计划提供了无需成本的3个单位(3U)立方体卫星(CUCESAT)启动插槽。这项合作于2019年9月在联合国大会宣布,并于2020年10月在Covid-19大流行中开放。通过该计划,Unoosa和Avio旨在提高人们对小型卫星在可持续发展和能力建设中的作用,以实现太空活动的能力,并弥合国家之间的空间差距。
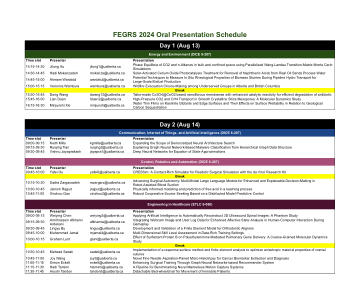
FEGRS 2024 口头报告时间表
13 Mohammadamin Rashidi mrashidi@ualberta.ca 分散液-液微萃取(DLLME)与全疏性玻璃纤维膜相结合用于超灵敏表面增强拉曼光谱 15 Rouhollah Heydari rheydari@ualberta.ca 蜂窝状沸石上汽车喷漆房挥发性有机化合物的循环吸附/再生 17 Jingya Pang jpang3@ualberta.ca 评估活化铝土矿残渣(ABR)去除水柱中 PFAS 的潜力 19 Farzad Dadbakhsh dadbakhs@ualberta.ca 地源热泵 21 Jian Shi js23@ualberta.ca 通过敏感性分析确定流域中的主要水文过程 23 Priscila Portocarrero pportoca@ualberta.ca 表征分散双翼鱼群中的尾流模式 25 Ramin Mashayekhi mashaye1@ualberta.ca 使用 LTSpice 27 中的热电路类比为立方体卫星开发辐射模型 Muhammad Muzzammil muzzammi@ualberta.ca 低成本石英音叉:用于表征低容量液体试剂的正交工具

空间的微型压电快速转向镜(FSM)...
空间FSM开发的光学通信的主要挑战是提出技术和供应链,与大量新空间方法相关,这需要对高速互联网,地球行星观察和监测以及移动性应用的安全连通性。CTEC提出了一种Mini-FSM技术,可提供+/- 6 MRAD的中风和1700 Hz的谐振频率,质量为50 gr。这种FSM机制是巨型星座以及板纳米人和立方体上所有应用的良好候选者,具有非常高的小型化水平,并且针对新的空间高量成本效率进行了优化。使用压电执行器的使用提供了很高的共振频率,以实现最佳控制,几乎零功耗的步骤和保持指向,并且在CTEC的optronics应用程序的多年反复制造中,非常高的可靠性数字> 0,995。1简介

用于太空激光通信的微型立方体卫星 2-W EDFA 的开发和太空认证
摘要:日本国家信息通信技术研究所 (NICT) 目前正在为立方体卫星开发高性能激光通信终端,旨在为需要从轨道传输大量数据的低地球轨道卫星提供高数据速率通信解决方案。通信系统的一个关键部分是高功率光放大器,它能够为传输的信号提供足够的增益,以便能够在对立方体卫星平台的能量和功率影响最小的情况下关闭其对应接收器上的链路。本文介绍了与立方体卫星外形尺寸兼容的小型化 2-W 空间级 2 级掺铒光纤放大器 (EDFA) 的开发,据作者所知,它显示了空间合格 EDFA 的最佳功率与尺寸比。介绍了在实际条件下以及完整的空间鉴定和测试下的性能结果,证明该模块可以支持短时间低地球轨道地面下行链路以及长时间卫星间链路。
小型航天器技术最新报告 - NASA
2013 年,NASA 发布《小型航天器技术最新进展》第一版报告时,全球已发射了 247 颗立方体卫星和 105 颗其他重量低于 50 公斤 (kg) 的非立方体卫星小型航天器,占多年来发射入轨质量的不到 2%。仅在 2013 年,发射的所有航天器中约有 60% 的质量低于 600 公斤,在 600 公斤以下的航天器中,83% 的质量低于 200 公斤,37% 是纳米卫星 (1)。在 2020 年发射的 1,282 颗航天器中,94% 是总质量低于 600 公斤的小型航天器,在 600 公斤以下的航天器中,28% 的质量低于 200 公斤,9% 是纳米卫星 (1)。自 2013 年以来,小型航天器的飞行历史增加了 30% 以上,并已成为商业、政府、私人和学术机构进入太空的主要来源。