XiaoMi-AI文件搜索系统
World File Search SystemDijkstra

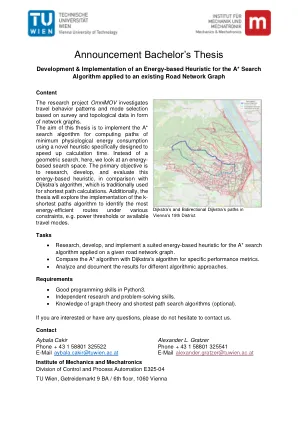
比较复杂网格中的Dijkstra和*算法...
●a*算法:在存在燃料站和虫洞时计算出的距离和节点方面表现出了出色的性能。A*的启发式性质使其能够有效利用这些元素,从而导致较短的路径和减少的计算工作。燃料站和虫洞的存在提高了A*的效率,使其可以更快地找到最佳或近乎最佳的路径。●Dijkstra的算法:尽管与**相比,dijkstra的算法通常效率较低,但仍受益于加油站和虫洞。由于燃料站而导致的路径成本的降低以及通过虫洞的可用性提高了其性能,但改进并不像A*那样明显。没有这些元素,Dijkstra的算法在更长的路径和更高的节点计算方面挣扎。

使用糖尿病患者中的静脉和毛细血管血液样本比较葡萄糖测量技术
通讯作者:Mahmut Dirik(mhmd.dirik@gmail.com)摘要路径计划问题是自动驾驶汽车中研究最多的主题之一。在过去的十年中,基于抽样的路径计划算法引起了研究界的重大关注。快速探索随机树(RRT)是一种基于抽样的计划方法,由于其渐近最佳性,研究人员是一个关注的问题。但是,在路径规划中使用接近障碍物的样品和急转弯的路径并不能使实时路径跟踪应用程序有效。为了克服这些局限性,本文提出了RRT和Dijkstra算法的组合。RRT-Dijkstra释放了一个较短且无碰撞的路径解决方案。它是通过各种因素来衡量的,例如路径长度,执行时间和回合总数。此处的目的是基于指标,即路径长度,执行时间和转折点总数的审查和绩效比较。在用障碍物结构的复杂环境中测试了算法。实验性能表明,RRT-Dijkstra需要在2D环境中更少的转折点和执行时间。这些是提出方法的优势。该建议的方法适用于离线路径计划和路径以下。

使用Dijkstra算法在服务机器人上使用Dijkstra算法
摘要。移动机器人中机器人技术的进步正在迅速发展,并在工业,军事,医学和公共服务等各个部门中使用。挑战包括感知,本地化,运动控制和路径计划。Dijkstra算法的目的是一种贪婪的算法,是优化计划计划以提高运动效率。Dijkstra的算法是图理论中的一种有用的方法,可以利用迭代方法在加权图中找到两个节点之间的最短路径来计算距离。所建议的算法通过同时确定从起点到所有其他点的最短途径,利用各种路径或继续在相同的路径上到达其他节点,从而加快了初始过程的速度。尽管如此,它始于中央节点,利用不受所采用路线影响的数据。作者使用服务机器人对Dijkstra的算法进行了实验,并成功地导航了三个障碍而没有任何碰撞。机器人通过保持0.23 m/s的平均速度为0.23 m/s,X轴上的平均误差为0.021米,在Y轴上保持0.021米,在找到最短和最快的路径方面取得了成功。

rrt- dijkstra:改进的移动机器人计划算法
摘要:近年来,碳纳米管(CNT)已作为材料出现,这些材料经常用于制备具有导电或高级介电特性的聚合物纳米复合材料,因为它们的独特特性(包括高温和电导率),包括高度和稳健的材料,具有很高的长度至直径比例。但是,在使用这些材料的聚合物纳米复合材料制备过程中,遇到了一些问题。主要问题之一是,在准备这些导电材料或将它们添加到聚合物中后,由于它们的导电结构,它们倾向于聚集,形成团聚。因此,在这项研究中,首先,多壁碳纳米管(MWCNT)用多苯胺(PANI)的导电形式(随后,聚(Dimethyl Siloxane)(PDMS)聚合物聚合物纳米复合膜功能化,具有不同浓度的多型多壁碳Nanotubes的浓度。然后,表征了膜的结构,形态,电和介电特性。仅添加了1.5%的PANI-CNT,在1 Hz时,PDMS的介电常数增加了47倍。此处介绍的介电膜可用于电容器,柔性电子,介电弹性体和人造肌肉应用。关键字:碳纳米管(CNTS),导电聚合物,介电,聚苯胺(PANI),聚合物纳米复合材料,聚(二甲基Siloxane)(PDMS)

基于图书馆物流的Q学习的多进球机器人路径计划⋆
摘要:本文提出了一种解决诸如评估周(例如评估周)图书馆图书馆等高需求期间的书籍组织的解决方案。在这些期间,由于借贷,返回,收集和存储书籍,图书馆工作人员面临的工作量增加。在这种情况下,我们提出了一种基于Q-学习访问图书馆中战略要点的解决方案,以提高员工绩效。为了验证提出的方法,在模拟中提出的方法与基于Dijkstra算法的贪婪方法进行了比较。结果表明,所提出的方法在计划时间和回合数方面优于贪婪的dijkstra算法,转弯次数减少了20%,计划时间至少是速度的两倍。完成分配任务的成功率为100%,在拟议的情况下证明了系统的适用性。

量子飞行自组织网络中的能量高效路由(q...
量子飞行自组织网络 (Q-FANET) 提供了一种独特的通信范式,利用量子原理实现安全高效的数据传输。然而,由于动态拓扑变化和有限的通信资源,Q-FANET 中的路由带来了重大挑战。本文提出了一种利用 Mamdani 模糊推理增强型 Dijkstra 算法 (MFI-EDA) 的新型路由方法,该方法专为 Q-FANET 环境量身定制。MFI-EDA 的工作机制涉及将模糊逻辑与 Dijkstra 算法相结合,以根据环境条件(例如节点移动性和能量水平)和网络动态(例如链路质量和流量拥塞)智能地调整路由决策。这种混合方法通过结合模糊逻辑来增强传统路由算法,从而为 Q-FANET 提供稳健性和适应性。其主要贡献在于模糊推理的无缝集成,这使 MFI-EDA 能够根据实时环境反馈动态调整路由路径,从而提高能源效率和可靠性。通过大量模拟实验评估了 MFI-EDA 在 Q-FANET 场景中的性能,证明了其在实现节能和可靠路由方面的有效性。结果表明,MFI-EDA 优于传统路由方法,为量子自组织网络中的高效通信提供了良好的前景。关键词:量子网络、Q-FANET、Mamdani 模糊推理、Dijkstra 算法、路由 1. 引言

量子探路者
印度新德里 SEST Jamia Hamdard 计算机科学与工程系 摘要 — 在图中寻找两点之间的最短路径的问题是计算机科学中的一个基本问题,在交通、物流和网络等领域有许多应用。Dijkstra 算法是一种常用于解决这个问题的经典算法,但是对于大图来说,它的时间复杂度可能过高。另一方面,量子计算提供了一种很有前途的方法来解决这个问题,并且时间复杂度显著提高。在本研究论文中,我们探讨了量子计算在解决最短路径问题方面的潜力,包括 Dijkstra 算法及其局限性的概述、使用量子相位估计的量子计算方法,以及经典算法和量子算法的时间复杂度的比较。我们还讨论了量子计算在解决实际最短路径问题中发挥潜力所需应对的挑战。
Cynthia Dwork
哈佛大学计算机科学教授,哈佛大学法学院和统计局的隶属教师戈登·麦凯(Gordon McKay)计算机科学教授,著名的教职员工以对数学上严格的基础进行隐私数据分析而闻名。 她还在密码学和分发计算方面做出了开创性的贡献,她率先研究了算法公平理论,即她目前的重点。 DWORK是众多奖项的获得者,包括IEEE HAMMING奖章,RSA数学卓越奖,Dijkstra,G \“ {O} DEL和Knuth奖,以及ACM Paris Kanellakis理论与实践奖。 她是美国国家科学院和美国国家工程学院的成员,并且是美国艺术与科学学院和美国哲学学会的会员。戈登·麦凯(Gordon McKay)计算机科学教授,著名的教职员工以对数学上严格的基础进行隐私数据分析而闻名。她还在密码学和分发计算方面做出了开创性的贡献,她率先研究了算法公平理论,即她目前的重点。DWORK是众多奖项的获得者,包括IEEE HAMMING奖章,RSA数学卓越奖,Dijkstra,G \“ {O} DEL和Knuth奖,以及ACM Paris Kanellakis理论与实践奖。她是美国国家科学院和美国国家工程学院的成员,并且是美国艺术与科学学院和美国哲学学会的会员。
off n°2025-08539
dijkstra最弱的基本谓词变压器无疑是程序语义和验证领域中最有效的工具之一。在过去的十年中,这种结构已被推广到概率程序:在这种情况下,公式的真理本质上是定量的,例如,真实价值观会变成概率。虽然这种方法是为概率命令计划建立的[Kozen,1981; McIver和Morgan,2005年; Avanzini等。2023,2024],其向高阶程序的扩展仍然没有被忽略。这是不幸的,例如基于游戏的加密证明固有地围绕着对高阶,概率程序的分析。