机构名称:
¥ 1.0
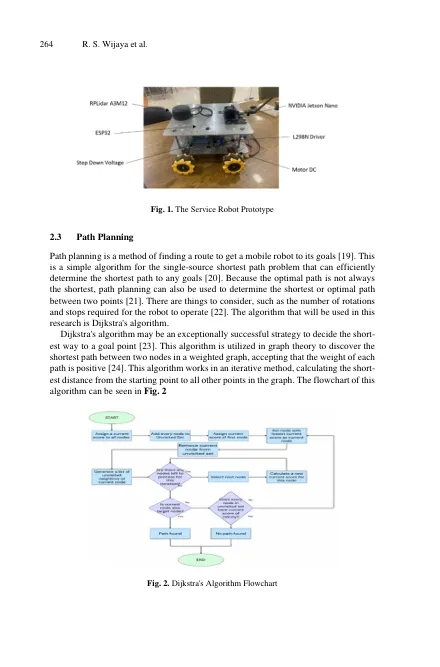
摘要。移动机器人中机器人技术的进步正在迅速发展,并在工业,军事,医学和公共服务等各个部门中使用。挑战包括感知,本地化,运动控制和路径计划。Dijkstra算法的目的是一种贪婪的算法,是优化计划计划以提高运动效率。Dijkstra的算法是图理论中的一种有用的方法,可以利用迭代方法在加权图中找到两个节点之间的最短路径来计算距离。所建议的算法通过同时确定从起点到所有其他点的最短途径,利用各种路径或继续在相同的路径上到达其他节点,从而加快了初始过程的速度。尽管如此,它始于中央节点,利用不受所采用路线影响的数据。作者使用服务机器人对Dijkstra的算法进行了实验,并成功地导航了三个障碍而没有任何碰撞。机器人通过保持0.23 m/s的平均速度为0.23 m/s,X轴上的平均误差为0.021米,在Y轴上保持0.021米,在找到最短和最快的路径方面取得了成功。
使用Dijkstra算法在服务机器人上使用Dijkstra算法
主要关键词




相关文件推荐