机构名称:
¥ 1.0
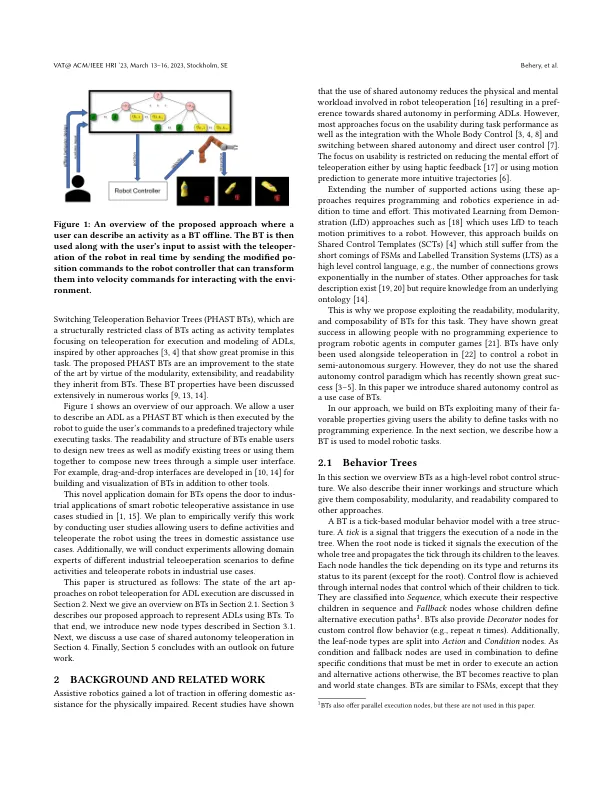
机器人手臂远距离任务中的机器人援助最近在工业和国内环境中获得了很多关注。在此类设置中使用了多种输入设备。由于输入信号(例如大脑计算机接口)中的噪声或由于环境条件(例如太空机器人遥控)引起的延迟,用户需要辅助自主权,以在遵循预先定义的轨迹和避免障碍的同时保持其控制权。这种协助要求操作员易于定义的活动表示形式,并能够考虑动态世界状态。本文表示使用行为树(BTS)的日常生活活动,其固有的可读性和模块化使最终用户能够使用简单的接口来定义新活动。为了实现这一目标,我们使用共享的控制操作节点增强BTS,该节点指导用户对轨迹促进和确保任务执行的输入。
使用行为树的辅助机器人触点
主要关键词

相关文件推荐