XiaoMi-AI文件搜索系统
World File Search SystemEGO
将我们的经济从自我转变为eco
传统经济思想中还有另一个盲点,它的关注程度明显降低:意识。我认为,意识可能是当今经济理论中最重要的盲点。意识涉及演员运作的内在位置。常规经济理论基于假定的偏好,即人们采取行动的一组内部条件。但是,如果我在许多部门和机构类型的行动研究人员工作的25年中学到了任何东西,那就是:每个演员和每个社会系统都没有一个,而是他们可以选择操作的多个内部条件。利益相关者选择哪种内部条件(例如,自我系统或生态系统意识)对结果产生了深远的影响,并且在很大程度上取决于领导能力创造的上下文条件(“容器”)。
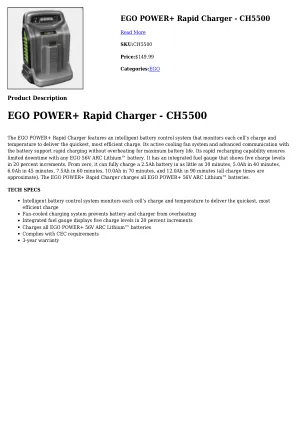
自我功率+快速充电器-CH5500-景观供应
自我功率+快速充电器具有智能电池控制系统,该系统可监视每个单元的充电和温度,以提供最快,最有效的充电。其主动冷却风扇系统和与电池支持快速充电的高级通信,而无需过热,以至于最大的电池寿命。其快速充电能力可确保使用任何EGO 56V ARC LITHIUM™电池有限的停机时间。它具有一个集成的燃油表,该燃油表显示了五个充电水平,增量为20%。从零开始,它可以在短短30分钟内为2.5AH电池充满电,40分钟内45分钟,45分钟,6.0AH,60分钟内7.5AH,在70分钟内为10.0AH,在90分钟内为12.0AH(所有充电时间均大致)。自我功率+快速充电器充电所有自我功率+ 56V ARC LITHIUM™电池。
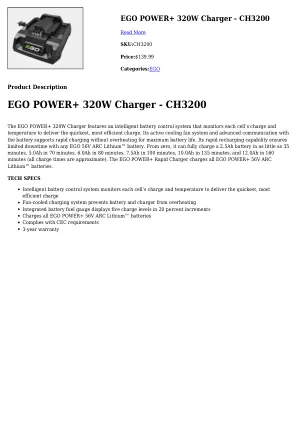
自我功率+ 320W充电器-CH3200-景观供应
自我功率+ 320W充电器具有智能电池控制系统,可监视每个单元的充电和温度,以提供最快,最有效的充电。其主动冷却风扇系统和与电池电量的高级通信可支持快速充电,而无需过热,以至于最大的电池寿命。其快速充电能力可确保使用任何EGO 56V ARC LITHIUM™电池有限的停机时间。从零开始,它可以在短短35分钟内为2.5AH电池充满电,在70分钟内5.0AH,80分钟内6.0AH,100分钟内7.5AH,在135分钟内为10.0AH,在160分钟内为12.0AH(所有充电时间均大致)。自我功率+快速充电器充电所有自我功率+ 56V ARC LITHIUM™电池。

是自我状态,端到...
碰撞率。虽然当前的方法倾向于评估计划轨迹的碰撞率[1-5,7],但在现有方法中的定义和实施中都存在问题。首先,在开环的最终自动驾驶中,其他代理不会引起自我汽车的反应。相反,他们严格遵守预定的轨迹。因此,这导致碰撞率的计算偏差。第二个问题源于以下事实:当前方法产生的计划预测仅由一系列轨迹点组成。因此,在最终碰撞计算中,不考虑自我汽车的偏航角。替代,假定它保持不变。此假设导致错误的结果,特别是在转弯场景中,如图1。当前实施中也存在问题。每个样本的碰撞率的当前定义是:

在气候变化下的保护区域设计网络中整合功能连接:驯鹿案例研究
摘要 - 动态场景中的移动对象细分(MOS)是一个重要的,具有挑战性但探索不足的重新搜索主题,以供自动驾驶,尤其是对于从移动的自我车辆获得的序列而言。大多数分割方法利用了从光流图获得的运动提示。但是,由于这些方法通常是基于从连续的RGB框架中预先计算的光流,因此这忽略了对间框架内发生的事件的时间考虑,因此限制了其识别其表现出相对静态性但在运动中确实在运动中表现出相对静态物体的能力。为了解决这些局限性,我们建议利用事件摄像机以更好地理解视频,从而在不依赖光流的情况下提供了丰富的运动提示。为了培养该领域的研究,我们首先引入了一个名为DSEC-MOS的新型大型数据集,用于从移动自我车辆中移动对象进行分割,这是同类的第一个。为了进行基准测试,我们选择了各种主流方法,并在我们的数据集上严格评估它们。随后,我们设计了一种能够利用事件数据的新型网络。为此,我们将事件的临时事件与空间语义图融合在一起,以区分真正的移动对象和静态背景,并围绕着我们感兴趣的对象增加了另一个密集的监督。我们提出的网络仅依靠用于培训的事件数据,但在推理过程中不需要事件输入,从而使其直接与仅限框架方法相媲美,并且在许多应用程序情况下都可以使用更广泛的使用。源代码和数据集可公开可用:https://github.com/zzy-zhou/dsec-mos。详尽的比较突出了我们方法对所有其他方法的显着性能提高。
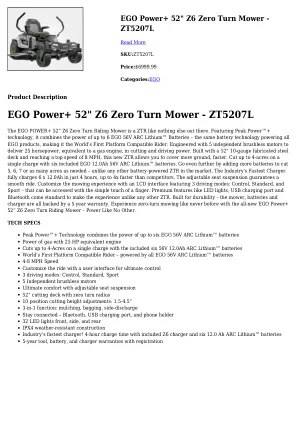
自我力量+ 52英寸Z6零转割割草机 - 景观供应
自我功率+ 52英寸Z6零骑行割草机是ZTR,就像其他地方一样采用Peak Power™+技术,它结合了高达6个EGO 56V ARC LITHIUM™电池的功率 - 相同的电池技术为所有EGO产品提供动力,使其成为世界上第一个兼容的骑手。采用5个独立无刷电动机设计,可在切割和驾驶功率方面提供25马力,等效于燃气发动机。使用52英寸的10号制造钢甲板制造,并达到8 mph的最高速度,该新的ZTR可以使您更快地覆盖地面一次充电,最多可将4英亩的土地切成六英亩,包括六个EGO 12.0AH 56V ARC LITHIUM™电池。与市场上的任何其他电池供电的ZTR不同,可以添加更多电池以削减5、6、7或尽可能多的英亩。该行业最快的充电器在短短4个小时内收取6 x 12.0AH的费用,比竞争对手快4倍。可调座悬架可确保平稳的骑行。使用具有3种驾驶模式的LCD接口自定义割草体验:控制,标准和运动 - 可以用手指的简单触摸来访问。高级功能,例如LED灯,USB充电端口和蓝牙等优质功能,以使体验与其他任何ZTR不同。为耐用性而构建 - 割草机,电池和充电器都有5年的保修。在全新的自我力量+ 52英寸Z6零转弯割草机上,从未像现在这样的零割草
您的数字另一个自我——您(从未)想要的超越时空的超级英雄/恶棍?
超级英雄和反派拥有各种各样的力量。例如,根据 Pop Chart Lab(2017 年)的“超级力量大全”,Sage 拥有超级智慧;隐形女侠隐形且难以接触;夜行者可以瞬间移动;时间陷阱可以穿越时空;魔形女可以变形;疯狂珍妮拥有多重身份;绿巨人拥有超强力量。每个超级英雄或超级反派都拥有某种超人技能,使他们能够以凡人无法做到的方式完成任务。虽然这些漫画人物是虚构的,但在某种程度上,我们每个人都有自己的超人“数字分身”2——或者通过监控实践获取的数字信息体,它们在数字空间中凝聚在一起,从修辞上展示了这些超人的力量:传输大量数据的能力、隐身的能力、超越的能力

一种定量方法,用于确定哪些碰撞是可以预见的,可预防的
奇怪的操作条件在给定的驾驶自动化系统或其效果下是专门设计的,用于运作,包括但不限于环境,地理和时间限制,以及/或必要的或/或必要的存在或不存在某些特征或路线特征(SAE J3016,2021,2021,2021,2021,2021,2021,2021) vehicle(s), the static environment, the dynamic environment, and all events that are relevant to the ego vehicle(s) within the time interval between the first and the last relevant event (de Gelder et al., 2022) Scenario category Qualitative description of the relevant characteristics and activities and/or goals of the ego vehicle(s), the static environment, and the dynamic environment (de Gelder et al., 2022) Reasonably foreseeable在现实生活中遇到的可能性超过一定的阈值奇怪的操作条件在给定的驾驶自动化系统或其效果下是专门设计的,用于运作,包括但不限于环境,地理和时间限制,以及/或必要的或/或必要的存在或不存在某些特征或路线特征(SAE J3016,2021,2021,2021,2021,2021,2021,2021) vehicle(s), the static environment, the dynamic environment, and all events that are relevant to the ego vehicle(s) within the time interval between the first and the last relevant event (de Gelder et al., 2022) Scenario category Qualitative description of the relevant characteristics and activities and/or goals of the ego vehicle(s), the static environment, and the dynamic environment (de Gelder et al., 2022) Reasonably foreseeable在现实生活中遇到的可能性超过一定的阈值

解析 Burt 的约束度量 - UKnowledge
Burt (1992) 提出了结构洞的两个主要度量,即有效大小和约束。然而,描述这些度量的公式有些晦涩难懂,并导致了一定程度的混乱。Borgatti (1997) 表明,对于二进制数据,有效大小公式可以非常简单地写成度(自我网络大小)减去自我网络内分身的平均度。本文提出了约束度量的类似重新表述。我们还推导出约束的最小值和最大值,表明对于小型自我网络,约束可以大于 1,而对于大型自我网络,约束不能大到 1。我们还表明,对于有超过 7 个分身的网络,最大约束不会出现在最密集或最封闭的网络中,而是出现在相对稀疏的“影子自我网络”中,这种网络包含一个分身(影子自我),该分身与其他每个分身相连,并且不存在其他分身-分身关系。

2024 Product Catalog
具有从2.5AH到12AH的一系列电池尺寸,您可以选择所需的电源。当需要充电时,Ego Power+ Turbo充电器是市场上最快的。智能电池控制系统不断监视每个电池的充电和温度,以提供最有效,最快的充电。