机构名称:
¥ 1.0
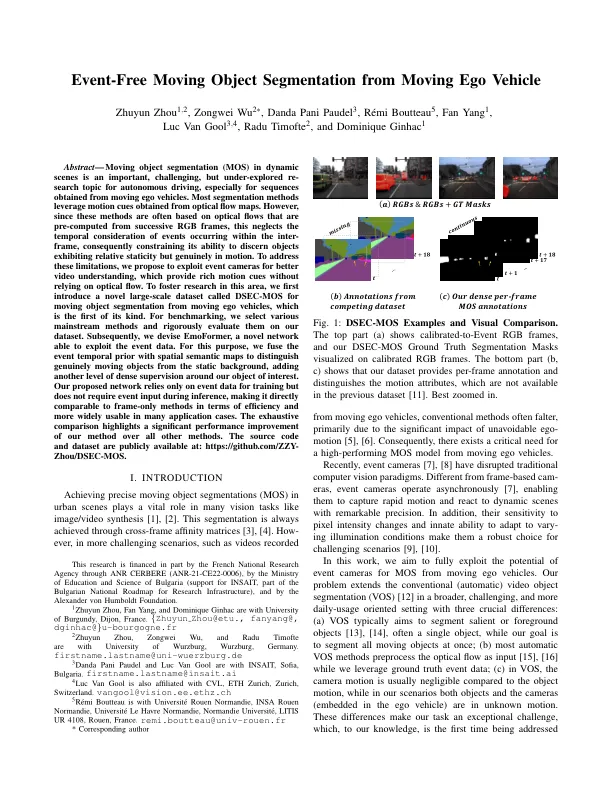
摘要 - 动态场景中的移动对象细分(MOS)是一个重要的,具有挑战性但探索不足的重新搜索主题,以供自动驾驶,尤其是对于从移动的自我车辆获得的序列而言。大多数分割方法利用了从光流图获得的运动提示。但是,由于这些方法通常是基于从连续的RGB框架中预先计算的光流,因此这忽略了对间框架内发生的事件的时间考虑,因此限制了其识别其表现出相对静态性但在运动中确实在运动中表现出相对静态物体的能力。为了解决这些局限性,我们建议利用事件摄像机以更好地理解视频,从而在不依赖光流的情况下提供了丰富的运动提示。为了培养该领域的研究,我们首先引入了一个名为DSEC-MOS的新型大型数据集,用于从移动自我车辆中移动对象进行分割,这是同类的第一个。为了进行基准测试,我们选择了各种主流方法,并在我们的数据集上严格评估它们。随后,我们设计了一种能够利用事件数据的新型网络。为此,我们将事件的临时事件与空间语义图融合在一起,以区分真正的移动对象和静态背景,并围绕着我们感兴趣的对象增加了另一个密集的监督。我们提出的网络仅依靠用于培训的事件数据,但在推理过程中不需要事件输入,从而使其直接与仅限框架方法相媲美,并且在许多应用程序情况下都可以使用更广泛的使用。源代码和数据集可公开可用:https://github.com/zzy-zhou/dsec-mos。详尽的比较突出了我们方法对所有其他方法的显着性能提高。
在气候变化下的保护区域设计网络中整合功能连接:驯鹿案例研究
主要关键词



相关文件推荐