XiaoMi-AI文件搜索系统
World File Search SystemExploration

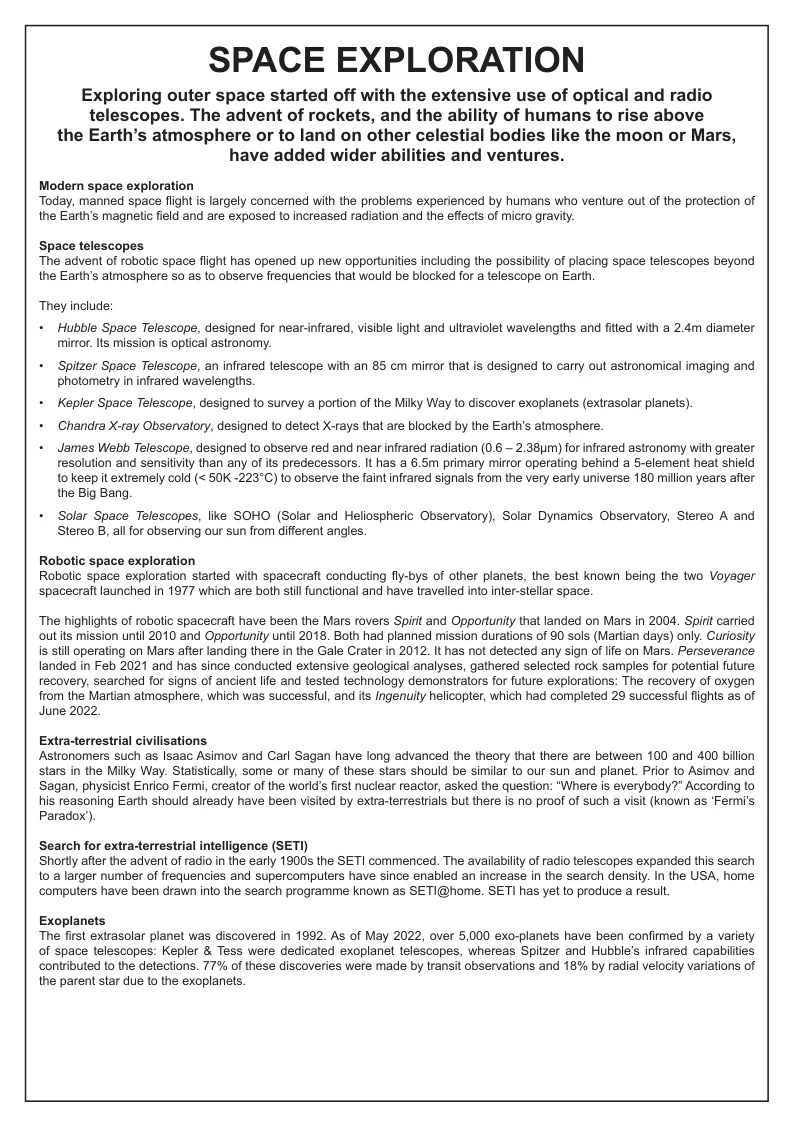
太空探索
• 公元前 300 年,希腊人阿基塔斯 (Archytas) 用水蒸气推动的模型鸽飞行 • 公元 100 年,中国人在空心竹子中装满火药 • 1232 年,中国人使用火箭作为武器 • 1898 年,康斯坦丁·齐奥尔科夫斯基 (Konstantin Tsiolkovsky) 提出使用火箭探索太空的想法 • 1903 年,齐奥尔科夫斯基出版了《用火箭推进的飞行器探索宇宙》;沃纳·冯·布劳恩 (Wernher von Braun) 阅读了齐奥尔科夫斯基的著作 • 1926 年,罗伯特·戈达德 (Robert Goddard) 成功发射了一枚液体燃料火箭 • 20 世纪 40 年代,沃纳·冯·布劳恩 (Wernher von Braun) 在与英国的战争中使用 V-2 火箭

7有效探索
对数遗憾:Lai&Robbins(1985)5的经典结果断言,最佳的遗憾率为O(log n)。实际上,在奖励分布的参数假设下,他们表明,所有保证所有α> 0的遗憾的政策必须采样至少1 c(a,a ∗)log n libies c(a,a,a,a,a,a,a,a,a ∗)= d(p(p(p(·| a),p(·| a),p(·| a ∗)extry ernection nige n lim diog n lim nige n lim nigial n ligials nigial n ligial。分布。他们的政策渐近地实现了最佳的遗憾,它基于上限范围(UCB)的概念,需要对这些界限进行微妙的操纵。


空间的探索
Mariner 2于1962年8月27日通过Atlas-Agena-b火箭弹以每小时约23,000 m i s的地球相对,从Cape Canaveral的大西洋导弹系列发射。地球以每小时66,000 m i s的速度在太阳围绕阳光的轨道上行进。水手2被注入了地球的轨道运动的倾斜路径上,以使其周围的速度降低,并开始向Venus的轨道驶向阳光的距离。9月4日,观察表明,水手将通过金星的距离约230,000英里,从地球上进行了中期校正,这使M I S S S距离降低了21,600英里,此时Mariner周围的Mariner速度将太阳周围的速度降低到每小时约60,000 m i s i s i s i l e s I l e s落后于地球,但落后于太阳。增加了,它于10月30日通过地球,距离为1,1.10万m i s,或金星轨道的一半。12月14日,发布后109%。t时,水手每小时旅行的速度约为87,000 m i s,金星在21,600 m i l e s外,地球约为36,000,000英里。水手已经在阳光下旅行了182,000,000 m i l e s或将近一半。12月27日,它达到了最接近的阳光,并继续以阳光的阳光行星继续前进。无线电联系于1963年1月3日丢失了53,000,000 m i l e s的距离,这是无线电通信的创纪录距离。

招聘作为探索
本文将招聘视为一个上下文匪徒问题:要找到最好的工人,随着时间的流逝,公司必须平衡“剥削”(从具有可靠的往绩记录的群体中选择)与“示例”(从代表性不足的群体中选择以了解质量)。基于“监督学习”方法的现代招聘算法仅是为了剥削而设计的。替代,我们构建了一种简历筛选算法,该算法通过根据候选者的统计上升潜力来评估候选者来重视探索。使用从财富500强公司中招募的专业服务的数据,我们表明,这种方法可提高选择进行面试的候选人的质量(根据最终招聘率来衡量),同时还增加了相对于公司现有实践的演示多样性。对于传统的基于监督学习的算法而言,这是不正确的,该算法提高了招聘率,但选择了黑色和西班牙裔申请人少得多。一起,我们的结果强调了将探索纳入可能更有效和公平的决策算法中的重要性。

平衡探索和晕屏
摘要 — 在虚拟导航过程中,用户会表现出受多种因素影响的各种交互和导航行为。现有的理论和模型已经发展到可以解释和预测这些不同的模式。虽然用户在使用虚拟现实 (VR) 时经常会感到不舒服,例如晕机,但他们并不总是做出最佳决策来减轻这些影响。尽管强化学习等方法已用于对决策过程进行建模,但它们通常依赖随机选择来模拟动作,无法捕捉真实导航行为的复杂性。在本研究中,我们提出好奇心是驱动非理性决策的关键因素,表明用户在虚拟导航过程中根据自由能原理不断平衡探索和晕机。我们的研究结果表明,VR 用户在导航时通常采用保守策略,大多数参与者在试验中表现出负面好奇心。然而,当虚拟环境发生变化时,好奇心水平往往会上升,这说明了探索和不适之间的动态相互作用。本研究提供了一种定量方法来解码虚拟导航过程中好奇心驱动的行为,为用户如何平衡探索和避免晕机提供了见解。未来的研究将通过结合更多的心理和环境因素来进一步完善该模型,以提高导航模式预测的准确性。

优化太空探索
以及深空探索和可持续生存,都需要这样的能力[6]。从轨迹规划到预测诊断,集成到人工智能解决方案中的算法减少了涉及复杂计算和基本员工监督的急性和慢性工作流程[7]。其结果是能够创建一个可以在很少的人为干预下完成任何不同任务类型的系统,这还提高了燃料使用效率和许多循环的可行性。这项研究的理由源于这样一种想法,即人工智能在解决当今太空探索问题方面具有巨大潜力。太空探索要求前往火星和月球等遥远的世界,或者更远的地方需要使用可重复使用的火箭和可靠的航天器着陆技术[8]。这些系统有助于优化轨迹,准确控制推力,甚至在不利的运行条件下检测出有利的着陆区[9]。通过监督学习,特别是强化学习,可以实现预测诊断,这不仅可以延长火箭的“使用寿命”,还可以减少维护需求[10]。因此,本研究将着手确定先进人工智能的实施在多大程度上通过提高效率、着陆精度以及系统可靠性来增强火箭系统的性能。因此,通过这些指标,该研究旨在支持以下发现:人工智能的整合如何迅速将空间技术和工程转变为更安全、更适合更先进任务的手段[11]。2. 研究问题和范围正如已经指出的那样,太空探索的进步意味着火箭发射和着陆机制的复杂性增加;对火箭更高精度的需求,以及火箭成功着陆至关重要[2],[7]。相比之下,传统的火箭系统在实时程序决策所需的大量干预和空间数据的随机性方面存在缺陷

主题探索报告1
外渗和浸润是指静脉 (IV) 液体从预定静脉意外泄漏到周围组织,这会导致不适或组织损伤。目前,临床医生通过定期评估 IV 插入部位来监测这些情况。光学传感器设备可以持续监测这些部位,并在发生事件时提醒临床医生。ivWatch 是文献中发现的唯一一款商用设备。一项范围界定审查包括两项观察性研究和一份关于 ivWatch 使用的会议摘要。另外还发现了两项观察性研究和一项正在进行的随机对照试验。已确定的研究发现,ivWatch 检测浸润/外渗的灵敏度通常很高,范围从 78.3% 到 100%。只有一项研究报告了特异性和总体准确性;发现它们分别为 83% 至 86.3% 和 65% 至 77.3%。据报道,ivWatch 比常规临床医生评估更早检测到浸润/外渗事件,平均早检测 6 小时至 32 小时。没有发现经济证据。纳入的研究缺乏随机性,样本量较小。大多数证据来自婴儿,唯一一项针对成年人的研究是在会议摘要中报告的。报告的结果缺乏多样性,在评估这项技术时,不确定哪些临床结果可能很重要。诊断这些疾病的参考标准也存在主观性和差异性。