XiaoMi-AI文件搜索系统
World File Search SystemFOV

一种机械柔性、可植入的神经接口,用于 5.45.4mm<sup></sup>2 FoV 上的计算成像和光遗传学刺激
摘要 — 新兴的光学功能成像和光遗传学是神经科学中研究神经回路最有前途的方法之一。将这两种方法结合到一个可植入设备中,可以实现全光学神经询问,并可立即应用于自由行为的动物研究。在本文中,我们展示了这样一种能够对大面积皮质区域进行光学神经记录和刺激的设备。这种可植入表面设备利用无透镜计算成像和新颖的封装方案实现了超薄(250μm 厚)、机械灵活的外形。该设备的核心是一个定制设计的 CMOS 集成电路,包含一个 160×160 的时间门控单光子雪崩光电二极管 (SPAD) 阵列,用于低光强度成像,以及一个散布的双色(蓝色和绿色)倒装芯片键合微型 LED (μLED) 阵列作为光源。我们在 5.4×5.4mm 2 视场 (FoV) 上实现了 60μm 横向成像分辨率和 0.2mm 3 体积精度。该设备实现了 125 fps 帧速率,总功耗为 40mW。索引术语 — 全光神经接口、计算成像、无透镜成像器、SPAD、光遗传学、柔性封装

kinova®Gen3-在机器人技术中一起
深度传感器(Intel®RealsenseTM)分辨率,帧速率(FPS),视场(FOV):最多480 x 270(16:9) @ @ @最高30 fps; FOV 72 +/- 3°(对角线)

4MP IP AI 摄像机 - PLC-424M-AI-IR3/PM
最小值照度 0.005 lux@F1.6, AGC ON; 0 lux with IR 0.0028 lux@F1.2, AGC ON; 0 lux with IR 镜头 3.6 mm@F1.6, 水平 FoV: 80.6°; 垂直 FoV: 50.6°; 对角线 FoV:88° 调焦 固定镜头接口 M12 日夜转换 ICR 宽动态范围 120dB BLC 支持 HLC 支持 除雾 支持 数字降噪 3D DNR 角度调整 平移: 0°~360°; 倾斜:0°~80°;旋转: 0°~360° 视频压缩 Smart H.265 / H.265+ / H.265 / Smart H.264 / H.264+ / H.264 / MJPEG H.264 压缩标准 Baseline Profile/Main Profile/High Profile

层全彩色碳化硅衍射波导
和安全优势。第一个光学透视 HMD 由 Sutherland 在 20 世纪 60 年代提出 6 。从那时起,光学透视技术在军事 7-11 、工业 12,13 和消费电子应用 14-16 中不断得到探索。已经开发出各种方法来将图像从微型投影仪引导到观察者,将现实世界的视图与虚拟图像相结合 16,17 。早期的 HMD 光学组合器基于传统的轴向分束器,如谷歌眼镜 18-20 所示。然而,由于视场 (FOV) 和框架尺寸与光学元件的尺寸成正比,因此在性能和舒适度之间取得平衡会导致此类智能眼镜的 FOV 更小。为了实现更大的 FOV,使用离轴非球面镜的 HMD
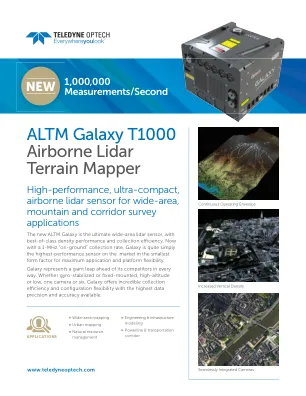
ALTM Galaxy T1000 - GEO3D
1. 连续操作范围 PulseTRAK™ 技术可消除其他配备多脉冲的传感器常见的数据覆盖间隙和不规则点密度,从而实现真正的连续操作范围。此功能大大简化了任务规划,并在整个数据集中产生一致的数据分布,甚至跨越接收器的“盲区”。» 实现一致的点密度,不再有接收器“盲区”。» 无论地形如何变化,都可以完全自由地进行收集,从而显著提高效率。» 大大简化了任务规划。 2. 动态视场 (FOV) Galaxy 采用 SwathTRAK™ 技术,是第一款采用实时动态 FOV 的传感器,即使在不同的地形高度也能保持固定宽度的扫描带。» 尽管地形高度发生变化,仍能保持规则的点分布并提高点密度的一致性。» 与固定 FOV 传感器相比,航线数量更少,但可最大程度地提高收集效率。 » 与固定 FOV 传感器设计相比,收集成本可节省 40-70%,具体取决于地形变化。
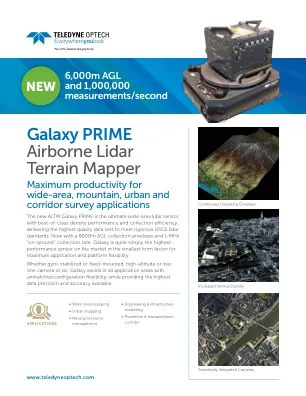
Galaxy PRIME 机载激光雷达地形测绘仪
1.连续操作范围 PulseTRAK™ 技术通过消除其他配备多脉冲的传感器中常见的数据覆盖间隙和不规则点密度,实现了真正的连续操作范围。此功能大大简化了任务规划,并在整个数据集中产生一致的数据分布,甚至跨越接收器“盲区”。» 实现一致的点密度,不再有接收器“盲区”。» 无论地形如何变化,完全自由收集可显著提高效率。» 大大简化了任务规划。2.动态视场 (FOV) Galaxy 采用 SwathTRAK™ 技术,是唯一一款采用实时动态 FOV 的传感器,即使在不同的地形高度下也能保持固定宽度的扫描带。» 尽管地形高度发生变化,仍能保持规则的点分布并提高点密度一致性。» 与固定 FOV 传感器相比,航线数量更少,可实现最大收集效率。» 与固定 FOV 传感器设计相比,收集成本可节省 40-70%,具体取决于地形变化。
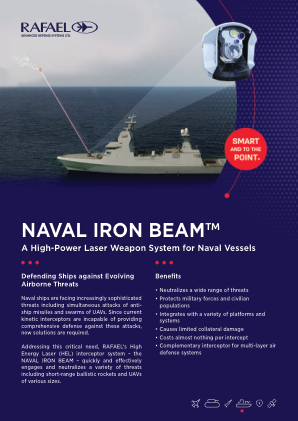
海军铁束激光武器系统.pdf
• 热航向跟踪传感器:冷却式 MWIR、可变 FOV 的 FLIR、高帧率、低延迟、高灵敏度 • 精细跟踪传感器:NIR、高帧率、极窄 FOV 和低延迟 • 激光照明单元 (LIU):NIR 波段的光纤耦合激光二极管 • 日视:主要用于监视功能的彩色变焦摄像机 • LRF 接收器:大型激光测距仪接收器光电二极管

研究文章:针对被忽视的热带疾病的经济实惠的基于人工智能的数字病理学:在 Kato-Katz 粪便厚涂片中检测土壤传播的蠕虫和曼氏血吸虫卵的概念验证
我们制作了一种基于人工智能的数字病理学 (AI-DP) 设备的原型,以探索自动扫描和检测用 Kato-Katz (KK) 技术制备的粪便中的蠕虫卵,该技术是诊断土源性蠕虫 (STH;蛔虫、鞭虫和钩虫) 和曼氏血吸虫 (SCH) 感染的现行诊断标准。首先,我们将原型全玻片成像扫描仪嵌入到柬埔寨、埃塞俄比亚、肯尼亚和坦桑尼亚的实地研究中。使用该扫描仪,扫描了超过 300 KK 厚的粪便涂片,总共得到 7,780 张视场 (FOV) 图像,包含 16,990 个带注释的蠕虫卵(蛔虫:8,600 个;鞭虫:4,083 个;钩虫:3,623 个;SCH:684 个)。约 90% 的带注释卵用于训练基于深度学习的物体检测模型。从 752 张 FOV 图像的未见过的测试集中,其中包含 1,671 个手动验证的 STH 和 SCH 卵(剩余 10% 的带注释卵),我们训练的物体检测模型从 KK 的共感染 FOV 图像中提取并分类了蠕虫卵

VT3000-AI
支持 开机:设备通电后,红灯常亮 正常工作:绿灯常亮 故障报警:指示灯红灯每秒闪一次 休眠:绿灯闪1秒,10秒灭 2个SD卡,支持SDXC64GB/128GB/256GB 3路视频,1路音频 VT3000-AI: 1080P@30fps VT-DSM-AI: 960P@30fps 1080P@30fps+960P@30fps+720P@30fps,3路CIF@15fps 亮度、色彩、对比度、色彩饱和度 H.264 VT3000-AI: 500Kbps ~ 6Mbps ADPCM/G.711 支持 可选(默认关闭) 1/2.9" 2M 像素 CMOS 传感器 1/30秒 - 1/100000 秒 VT670-IPC: 1.98 毫米/150° (FOV); VT3000: 4 毫米/90° (FOV) M12 D-WDR 支持 >48db
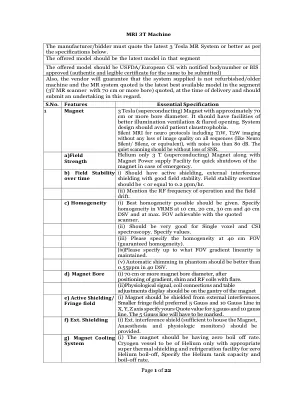
MRI 3T机器
i)应具有具有良好场地稳定性的主动屏蔽,外部干扰屏蔽。场稳定的加班应为<或等于0.2 ppm/hr。(ii)提及RF操作频率和场漂移。c)同质性(i)应提供最佳同质性。在10 cm,20 cm,30 cm和40 cm DSV的VRMS中指定同质性,最大。可以用引用的扫描仪来实现。(ii)对于单素体素和CSI光谱应该非常好。指定值。(iii)请在40 cm FOV(保证同质性)处指定同质性。(iv)请指定保持哪些FOV梯度线性。(v)幻影中的自动弹跳应优于40 dsv中的0.55ppm。d)磁铁孔(i)70厘米或更多的磁铁孔直径,梯度,垫片和射频线圈用耀斑定位后。(ii)生理信号,线圈连接和表调整应显示在磁铁的龙门上e)主动屏蔽/条纹场 div>