XiaoMi-AI文件搜索系统
World File Search SystemGRASP

启用了脊髓损伤中的自愿性手掌握恢复
宫颈脊髓损伤后的手功能丧失严重损害了功能独立性。我们描述了一种在一个完全宫颈四肢瘫痪(C5美国脊柱损伤关联量表a)中,使用便携式全植入式脑部计算机界面的一个完全宫颈四肢瘫痪量(C5美国脊柱损伤关联量表a)的方法来恢复手动掌握的能力控制。大脑 - 计算机界面由放置在主要手动皮层上的硬膜下表面电极组成,并连接到锁骨下方皮下植入的发射器,从而可以连续读取皮层学活性。运动意愿来触发主要手的功能性电刺激。移动信息信息可以在29周内的阶段性研究中进行一致的解码,平均准确性为89.0%(范围为78–93.3%)。在各种上肢任务的速度和准确性中都观察到了改进,包括提起小物体并将对象传输到特定目标。在开环试验期间,在家解码的准确性达到91.3%(范围80-98.95%),在闭环试验期间的授予率为88.3%(范围77.6-95.5%)。重要的是,本研究未探索功能结果和解码器指标的时间稳定性。完全植入的大脑 - 计算机界面可安全地用于可靠地从运动皮层中移动,从而可以准确地对手掌握。

PreMovNet:基于运动前脑电图的抓握和举起任务手部运动学估计
摘要——从大脑活动进行运动学解码有助于开发康复或增强功率的脑机接口设备。从非侵入性脑电图 (EEG) 记录的低频信号与用于运动轨迹解码 (MTD) 的神经运动相关性相关。在本通讯中,研究了从运动前 delta 波段 (0.5-3 Hz) EEG 解码运动运动轨迹的能力,适用于健康参与者。具体来说,提出了两个基于深度学习的神经解码器,称为 PreMovNet-I 和 PreMovNet-II,它们利用运动前 EEG 数据中存在的运动相关神经信息。为此,使用了运动开始前具有不同时间滞后的 150 毫秒、200 毫秒、250 毫秒、300 毫秒和 350 毫秒的 EEG 数据段。使用 EEG 为抓握和举起任务 (WAY-EEG-GAL 数据集) 呈现 MTD,并将各种滞后作为神经解码器的输入。将所提出的解码器的性能与最先进的多变量线性回归 (mLR) 模型进行比较。使用皮尔逊相关系数和手部轨迹作为性能指标。结果证明了使用运动前 EEG 数据解码 3D 手部运动学的可行性,从而能够更好地控制基于 BCI 的外部设备,例如外骨骼/外骨骼。

钠离子电池新材料带来经济实惠、可持续的未来
这种新材料是磷酸钒钠,化学式为 Na x V 2 (PO 4 ) 3 ,它通过将能量密度(每千克储存的能量)提高 15% 以上来改善钠离子电池的性能。与旧款钠离子电池的 396 Wh/kg 相比,这种材料的能量密度更高,为 458 瓦时/千克 (Wh/kg),使钠技术更接近与锂离子电池竞争。

双谱无创脑电信号分析可区分复杂和自然的抓握类型
摘要 — 双谱是频域分析中一种革命性的工具,它通过捕获频率分量之间的关键相位信息,超越了通常的功率谱。在我们的创新研究中,我们利用双谱分析和解码复杂的抓握动作,收集了来自五名人类受试者的脑电图数据。我们用三个分类器对这些数据进行了测试,重点关注幅度和相位相关特征。结果突出了双谱深入研究神经活动和区分各种抓握动作的惊人能力,其中支持向量机 (SVM) 分类器表现出色。在二元分类中,它在识别强力抓握方面实现了惊人的 97% 的准确率,而在更复杂的多类任务中,它保持了令人印象深刻的 94.93% 的准确率。这一发现不仅强调了双谱的分析能力,还展示了 SVM 在分类方面的卓越能力,为我们理解运动和神经动力学打开了新的大门。索引术语 —EEG(脑电图)、双谱、交叉双谱、握力解码和机器学习。

四肢瘫痪患者运动皮层中不同抓握类型的力量神经表征
1 凯斯西储大学生物医学工程系,俄亥俄州克利夫兰 44106,2 斯坦福大学神经外科系,加利福尼亚州斯坦福 94035,3 斯坦福大学电气工程系,加利福尼亚州斯坦福 94035,4 VA 医学中心路易斯斯托克斯克利夫兰系,俄亥俄州克利夫兰 44106,5 布朗大学神经科学系,罗德岛州普罗维登斯 02912,6 布朗大学罗伯特 J. 和南希 D. 卡尼脑科学研究所,罗德岛州普罗维登斯 02912,7 VA RR&D 神经修复和神经技术中心,罗德岛州普罗维登斯 02912,8 克利夫兰大学医院医学中心神经外科系,俄亥俄州克利夫兰 44106,9 凯斯西储医学院神经外科系,俄亥俄州克利夫兰 44106,10克利夫兰大学医院医学中心神经内科,俄亥俄州克利夫兰 44106,11 布朗大学工程学院,罗德岛州普罗维登斯 02912,12 麻省总医院神经内科神经技术和神经康复中心,马萨诸塞州波士顿 02114,13 哈佛医学院神经内科,马萨诸塞州波士顿 02114,14 斯坦福大学生物工程系,加利福尼亚州斯坦福 94035,15 斯坦福大学神经生物学系,加利福尼亚州斯坦福 94035,16 斯坦福大学霍华德休斯医学研究所,加利福尼亚州斯坦福 94035,17 斯坦福大学吴仔神经科学研究所,加利福尼亚州斯坦福 94035,以及 18 斯坦福大学 Bio-X 项目,加利福尼亚州斯坦福 94035

四肢瘫痪患者运动皮层中不同抓握类型的力量神经表征
1 凯斯西储大学生物医学工程系,俄亥俄州克利夫兰,44106;2 斯坦福大学神经外科系,加利福尼亚州斯坦福,94035;3 斯坦福大学电气工程系,加利福尼亚州斯坦福,94035;4 退伍军人事务部克利夫兰路易斯斯托克斯医学中心,俄亥俄州克利夫兰,44106;5 布朗大学神经科学系,罗德岛州普罗维登斯,02912;6 布朗大学罗伯特 J. 和 Nancy D. 卡尼脑科学研究所,罗德岛州普罗维登斯,02912;7 VA RR&D 神经修复和神经技术中心,罗德岛州普罗维登斯,02912;8 休斯顿大学克利夫兰医学中心神经外科系,俄亥俄州克利夫兰,44106; 9 克里夫兰凯斯西储大学医学院神经外科系,俄亥俄州克利夫兰 44106;10 克里夫兰大学医学中心神经内科系,俄亥俄州克利夫兰 44106;11 布朗大学工程学院,罗德岛州普罗维登斯 02912;12 麻省总医院神经内科神经技术和神经康复中心,马萨诸塞州波士顿 02114;13 哈佛医学院神经内科系,马萨诸塞州波士顿 02114;14 斯坦福大学生物工程系,加利福尼亚州斯坦福 94035;15 斯坦福大学神经生物学系,加利福尼亚州斯坦福 94035;16 斯坦福大学霍华德休斯医学研究所,加利福尼亚州斯坦福 94035;17 斯坦福大学吴仔神经科学研究所,Bio-X 项目,加利福尼亚州斯坦福 94035
将深Q学习与掌握质量网络的集成用于机器人在混乱的环境中抓住
摘要在机器人臂运动过程中,如果手臂直接抓住多个紧密堆叠的物体,则很容易发生碰撞,从而导致掌握故障或机器损坏。可以通过重新排列或移动对象清除抓握空间来提高成功。本文提出了一个高性能的深Q学习框架,可以帮助机器人手臂学习同步的推动和掌握任务。在此框架中,使用GRASP质量网络用于精确识别物体上的稳定掌握位置,以加快模型收敛性并解决由于掌握故障而在训练期间造成的稀疏奖励问题。此外,提出了一种新颖的奖励功能,以有效评估推动作用是否有效。在模拟和现实世界实验中,提出的框架分别达到了92%和89%的成功率。此外,仅需要200个培训步骤才能达到80%的成功率,这表明拟议的框架在工业环境中快速部署的适用性。
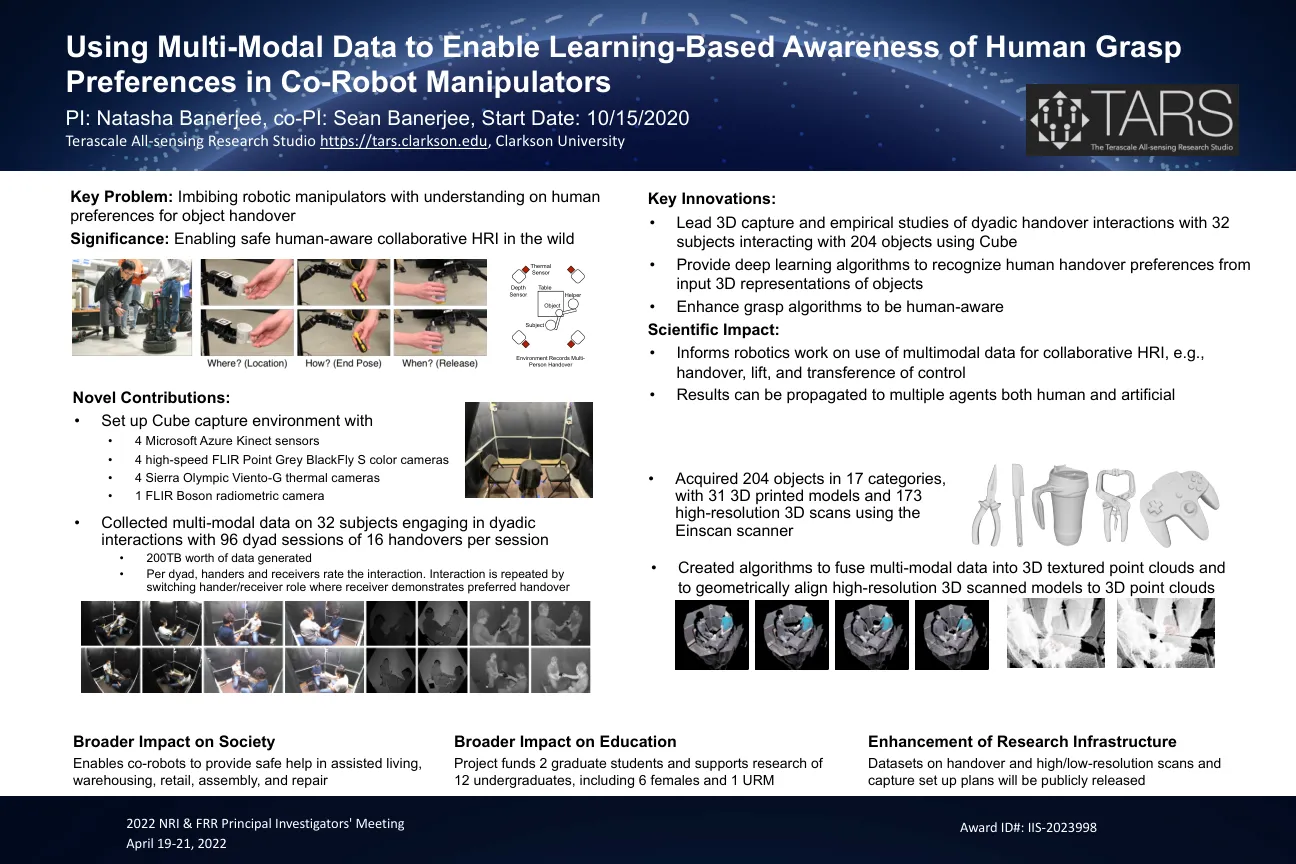
使用多模式数据来实现基于学习的人类掌握偏好的认识
•铅3D捕获和经验研究与32个受试者使用Cube与204个对象相互作用的二元移交相互作用•提供深度学习算法,以识别物体输入3D表示的人类移交偏好•增强掌握算法是人为意识到的科学影响:
风能和太阳能光伏系统的联合调度策略,以掌握竞争市场的不平衡成本
摘要:可再生能源与活性热电厂的整合有助于全球绿色环境。要实现可再生 - 热杂交系统的最大可靠性和可持续性,需要考虑大量约束,以最大程度地减少情况,这是由于可再生能源的不可预测性而产生的。在风集成放松管制的系统中,风电场需要在运行日期之前向独立系统操作员(ISO)提交发电场景。基于他们提交的出价,ISO安排了来自不同生成站的发电,包括热和可再生。由于风流的不确定性质,总是有可能不填充风电场的日程安排量。市场中这种违规行为可能会对发电公司施加经济负担(即失衡成本)。太阳能光伏电池可用于减少放松管制系统中不可预测的风饱和度的不利经济影响。本文为太阳能光伏和风电场的混合操作提供了一致,胜任和有效的操作方案,以最大程度地降低不平衡成本,这是由于实际风速和预测风速之间的不匹配而导致的不平衡成本。修改的IEEE 14-BUS和修改IEEE 30总线测试系统已用于检查所提出的方法的有用性。在这项工作中使用了三种优化技术(即,序列二次编程(SQP),智能花优化算法(SFOA),蜂蜜ba算算法(HBA))进行了比较研究。在这里提出了总线加载因子(BLF),以识别系统中最敏感的总线,用于放置风电场。SFOA和HBA优化技术已在这种类型的经济评估问题中第一次使用,这是本文的新颖性。在此处引入了总线加载因子(BLF),以识别系统中最敏感的总线。实施工作后,已经可以看到,太阳能光伏系统的运行减少了不平衡成本对可再生综合失调电源系统的不利影响。

在复杂包装工厂环境下进行精确抓握的新型机器人抓握框架(2024年9月)
抽象作为实际包装场景中的抓地力行为很容易受到各种干扰的影响,视觉抓握预测系统遭受了稳健性和检测准确性低的差。在这项研究中,已经提出了一个以线性全球注意机制为基础的智能机器人抓手框架(RTNET),以实现在实际包装工厂场景中实现高度稳健的机器人掌握的预测。首先,为了减少计算资源,在机器人抓握过程中已经开发了一种优化的线性注意机制。然后,已对本地窗口转换算法进行了调整,以收集功能信息,然后通过向上和下采样的层次设计集成全局功能。为了进一步改善开发的框架,可以通过减轻噪声干扰的能力,建立了一种自称的特征体系结构,以增强其强大的学习能力。此外,已经生成了真正的操作环境中的握把数据集(RealCornell),以实现对真实抓地力的过渡。为了评估所提出的模型的性能,在Cornell数据集,实核数据集和实际场景上对其掌握的预测进行了实验检查。结果表明,RTNET在Cornell数据集上的最大准确度为98.31%,在复杂的RealCornell数据集上达到了93.87%。在考虑实际包装情况下,所提出的模型还证明了在抓住检测方面的准确性和鲁棒性水平很高。综上所述,RTNET对包装行业的机器人握把的高级部署和实施提供了宝贵的见解。