XiaoMi-AI文件搜索系统
World File Search SystemGRASP

猕猴在同侧和对侧伸手抓握过程中初级皮质和运动前皮质局部场电位的差异调节
研究文章 | 系统/电路 猕猴在同侧和对侧伸手抓握过程中初级和运动前皮质局部场电位的差异调节 https://doi.org/10.1523/JNEUROSCI.1161-23.2024 收到日期:2023 年 6 月 23 日 修订日期:2024 年 4 月 2 日 接受日期:2024 年 4 月 3 日 版权所有 © 2024 Falaki 等人。这是一篇开放获取的文章,根据知识共享署名 4.0 国际许可条款分发,允许在任何媒体中不受限制地使用、分发和复制,前提是对原始作品进行适当的署名。

您将再次掌握:脊髓/计算机与保留的运动神经元的直接接口可恢复慢性脊髓损伤后瘫痪手的灵巧控制
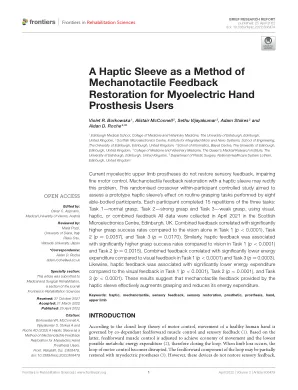
图 1 | a. 实验装置由放置在前臂肌肉中的 320 个表面 EMG 电极组成。运动指令由受试者前方的显示器上显示的虚拟手视频引导。b. 一些示例电极显示受试者尝试抓握任务(手指屈伸,0.5Hz)时的原始 HDsEMG 信号。c. 基于运动单元动作电位均方根值的空间映射示例。d. 在两指捏合任务的 10 秒内识别的运动单元激发(颜色编码)的光栅图。e. 使用因式分解分析为同一任务提取的神经模块。f. 具有两个神经模块的各个运动单元的 Pearson 相关值 (r)。g. 在所有任务和受试者中识别的运动单元 (MU) 数量(每个点代表一个受试者)。h. 两个神经模块(M1 - 蓝色和 M2 - 红色)解释方差的百分比,在所有受试者中平均。

第二读
混合脑 - 计算机界面(BCIS)用于中肢康复后,应促进“更正常”的大脑和肌肉活动的增强。在这里,我们提出了皮质肌肉相干性(CMC)和肌间相干性(IMC)的组合,作为用于康复目的的新型混合BCI的控制特征。在20名健康参与者中收集了来自每侧5个肌肉的多个脑电图(EEG)信号和表面肌电类(EMG)(EMG),并以优势和非优势手进行了纤维伸展(EXT)和抓握(grasp)。CMC和IMC模式的平均值显示出双侧感觉运动区域以及多个肌肉的参与。cmc和imc值用作对每个任务与休息和ext and grasp进行分类的功能。我们认为,CMC和IMC特征的组合允许将两种运动与休息进行分类,而在EXT运动(0.97)的性能(接收器操作特征曲线,AUC下)相对于抓握(0.88)(0.88)。ext v v and grasp的分类也显示出较高的表现(0.99)。总的来说,这些初步发现表明,CMC和IMC的组合可以为最终在混合BCI系统中采用简单的手动运动提供全面的框架,以进行后击球后康复。
引用方式:Shi, TW, Chen, K.-J., Ren, L., Cui, W.-H. (2023)。基于运动意象的机械臂抓握控制脑机接口。
本文提出了一种脑机接口(BCI)系统,利用ABB机械臂实现手部和腕部控制。该BCI系统从30个电极采集四类运动想象(MI)任务(手抓握、手伸展、腕部屈曲和腕部伸展)脑电图(EEG)信号。它利用两个具有不同带宽的五阶巴特沃斯带通滤波器(BPF)和归一化方法实现原始MI任务EEG信号的预处理。特征提取的主要挑战是从预处理后的EEG信号中分析MI任务意图。因此,所提出的BCI系统在时域和时频域中提取了十一种特征,并使用互信息方法来降低提取特征的维数。此外,BCI系统应用一个具有30个滤波器的单卷积层卷积神经网络(CNN)来实现MI任务的四级分类。与现有研究相比,该BCI系统的分类准确率提高了约32%-35%,实际机械臂抓取控制实验验证了该BCI系统具有良好的适应性。

带有触觉传感的机器人手的通用滑动检测
滑动检测是要识别抓握过程中对象是否保持稳定,这可以显着增强操纵灵量。在这项研究中,我们探索了能够执行各种掌握类型的五指机器人手的滑移检测,并在整个五个手指上检测到滑移,而不是专注于单个指尖。首先,我们构建了一个在六种抓地力类型的日常生活中收集的数据集,其中包括200 k个数据点。第二,根据深重下降的原理,我们为不同的抓握类型(USDConvnet-dg)设计了一个轻巧的通用滑动检测网络,以对掌握状态进行分类(无触摸,打滑和稳定的抓紧)。通过将频率与时域特征相结合,该网络的计算时间仅为1.26 ms,平均精度在验证和测试数据集上的平均精度超过97%,表明了强大的概括功能。此外,我们在现实世界中的实时掌握力调整中验证了提出的USDConvnet-DG,表明它可以有效地提高机器人操作的稳定性和可靠性。

操纵所有内容的补充材料
动作生成模块。我们使用以代理为中心或以对象为中心的方法生成每个动作。对于以对象为中心的动作生成,我们利用了NVIDIA的基础掌握预测模型M2T2 [1]进行选择和放置动作。对于6-DOF抓握,我们从单个RGB-D摄像头(在现实世界中)或多个摄像机(在模拟中)输入一个3D点云。该模型在任何可抓取的物体上输出一组掌握提案,提供6-DOF的抓取候选物(3-DOF旋转和3D-DOF翻译)和默认的抓地力关闭状态。对于放置操作,M2T2输出一组6-DOF放置姿势,指示在基于VLM计划执行Drop原始操作之前,最终效应器应在何处。网络确保对象在没有冲突的情况下稳定地定位。我们还设置了mask_threshold和object_threshold的默认值,以控制拟议的GRASP候选人的数量。提出了模板抓取姿势的列表后,我们使用QWEN-VL [2]通过使用机器翻译模型[3]提示当前图像框架来检测目标对象。此检测应用于来自不同相机的所有重新渲染观点或观点。然后,我们将这些帧连接到单个图像中,将每个子图像用右上角的数字注释。接下来,我们将带有几次演示的GPT-4V API调用,并且任务目标提示GPT-4V输出所选数量的视点,这些视点为采样抓取姿势提供了最无用的视图以实现子任务。使用选定的观点,我们通过将最终效果通过运动计划者移动到采样的抓握姿势来执行掌握。
![arxiv:2407.13842v2 [CS.RO] 2024年7月25日 - 计算机科学](/simg/6\6e72888a77e9f0494f575ac07307f3dc4c09dfd8.webp)
arxiv:2407.13842v2 [CS.RO] 2024年7月25日 - 计算机科学
摘要。6-DOF GRASP检测一直是机器人视觉中的一个基本和挑战问题。虽然以前的作品着重于确保掌握稳定性,但他们通常不考虑通过自然语言传达的人类意图,从而阻碍了在复杂的3D环境中的机器人和用户之间的有效协作。在本文中,我们提出了一种新的方法,用于在混乱的点云中以语言驱动的6-DOF掌握检测。我们首先引入Grasp-Anything-6D,这是一个大型数据集,用于语言驱动的6-DOF GRASP检测任务,其中1M点云场景和超过200M语言相关的3D抓取姿势。我们进一步引入了一种新型的扩散模型,该模型结合了新的负面及时指导学习策略。拟议的负及时策略将检测过程指向所需的对象,同时鉴于语言的使用,将检测过程转向不需要的对象。我们的方法启用了一个端到端框架,其中人类可以使用自然语言在混乱的场景中掌握所需的对象。密集的实验结果显示了我们方法在基准测试实验和现实情况下的有效性,超过了其他基线。此外,我们还证明了在现实世界机器人应用中的实用性。我们的项目可在https://airvlab.github.io/grasp-anything上使用。

Myokey:惯性运动感测和基于手势的QWERTY键盘扩展现实
摘要 - 在扩展现实(XR)的背景下对文本输入的挑战和社会接受,激发了新型输入方式的研究。我们研究了使用Qwerty-layout虚拟键盘应用于文本条目的惯性测量单元(IMU)控制和表面肌电图(SEMG)手势识别的融合。我们设计,实施和评估了名为Myokey的提议的多模式解决方案。用户可以通过手臂运动和手势组合选择字符。Myokey采用轻量级卷积神经网络分类器,可以在具有微不足道的推理时间上部署在移动设备上。我们通过在三种情况下招募12名参与者并测试了三组抓地力微观手机,证明了与Myokey无中断的文本条目的实用性:空手文本输入,三脚架抓握(例如,笔)和圆柱形掌握(例如,pen)。使用Myokey,用户的平均文本输入率为每分钟9.33个单词(WPM),8.76 wpm和8.35 wpm,分别为徒手,三脚架掌握和圆柱形掌握条件。
针对肝细胞癌的新型尿液游离 DNA 甲基化标记
开发了一种优化的针对肝细胞癌 (HCC) 的甲基化下一代测序检测方法,可直接从尿液中发现与 HCC 相关的甲基化标记物,以进行 HCC 筛查。从 31 名非 HCC 和 30 名 HCC 患者的发现队列中分离的尿液无细胞 DNA (ucfDNA) 用于生物标志物发现,鉴定出 29 个具有差异甲基化区域 (DMR) 的基因。开发了甲基化特异性 qPCR (MSqPCR) 检测方法以验证对应于 8 个基因 (GRASP、CCND2、HOXA9、BMP4、VIM、EMX1、SFRP1 和 ECE) 的选定 DMR。使用存档的 ucfDNA,发现 HCC 患者和非 HCC 患者的 GRASP、HOXA9、BMP4 和 ECE1 的甲基化存在显著差异 (p < 0.05)。使用逻辑回归模型,在 87 名非 HCC 患者和 78 名 HCC 患者的独立训练队列中,将这四种标记物与之前报道的 GSTP1 和 RASSF1A 标记物作为 6 种标记物组合进行评估。6 种标记物组合与 AFP 的 AUROC 为 0.908(95% CI,0.8656–0.9252),显著高于单独使用 AFP(AUROC 0.841(95% CI,0.778–0.904),p = 0.0026)。应用后向选择方法,发现 4 种标记物组合与 6 种标记物组合的性能相似,AFP 的敏感性为 80%,而单独使用 AFP 的敏感性为 29.5%,特异性为 85%。这项研究支持甲基化跨肾 ucfDNA 在 HCC 筛查中的潜在应用。
触觉套管作为肌电假手用户机械触觉反馈恢复方法
目前的肌电上肢假肢无法恢复感觉反馈,从而损害了精细运动控制。使用触觉套进行机械触觉反馈恢复可能会纠正这个问题。这项随机交叉参与者内对照研究旨在评估原型触觉套对八名健全参与者执行的常规抓握任务的影响。每位参与者完成三项任务的 15 次重复:任务 1——正常抓握,任务 2——强抓握和任务 3——弱抓握,使用视觉、触觉或组合反馈所有数据均于 2021 年 4 月在英国爱丁堡苏格兰微电子中心收集。与任务 1(p < 0.0001)、任务 2(p = 0.0057)和任务 3(p = 0.0170)中的单独视觉相比,组合反馈与明显更高的抓握成功率相关。类似地,在任务 1 ( p < 0.0001) 和任务 2 ( p = 0.0015) 中,触觉反馈与视觉相比具有显著更高的抓取成功率。在任务 1 ( p < 0.0001) 和任务 3 ( p = 0.0003) 中,与视觉反馈相比,组合反馈与显著更低的能量消耗相关。同样,在任务 1 ( p < 0.0001)、任务 2 ( p < 0.0001) 和任务 3 ( p < 0.0001) 中,与视觉反馈相比,触觉反馈与显著更低的能量消耗相关。这些结果表明,触觉套管提供的机械触觉反馈可有效增强抓握能力并降低其能量消耗。