XiaoMi-AI文件搜索系统
World File Search SystemHelicopter

直升机完工 - Metro Aviation
GNS 430W 中的 HTAWS 功能提供相对于直升机的地形和障碍物的视觉描述,以提高态势感知能力;以及当地形或障碍物对直升机的安全飞行构成威胁时发出视觉和听觉警报。HTAWS 功能由位于专用 GNS 430W TAWS 页面上的菜单控制。此安装的周期性握把上安装了“降低保护”和“静音”控件。G500H PFD/MFD 显示器 (GDU 620) 已连接,将显示 GNS 430W 的所有 HTAWS 报警模式,例如 INHIBIT、TEST 或 RP MODE,从而无需单独的 HTAWS 报警器面板。
海上直升机飞行员的疲劳
................................................ . ……………………………… …………………………………… ... 29

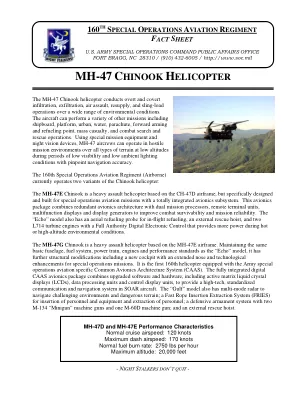
mh-47 奇努克直升机 - SOC.mil
第 160 特种作战航空团(空降)目前运营两种型号的“支奴干”直升机:MH-47E“支奴干”是一种基于 CH-47D 机身的重型攻击直升机,但专为特种作战航空任务设计和制造,具有完全集成的航空电子子系统。该航空电子设备组合将冗余航空电子架构与双任务处理器、远程终端单元、多功能显示器和显示发生器相结合,以提高战斗生存力和任务可靠性。“Echo”型号还配备了用于飞行中加油的空中加油探头、外部救援绞车和两台 L714 涡轮发动机,配备全权限数字电子控制,可在炎热或高海拔环境条件下提供更多动力。MH-47G“支奴干”是一种基于 MH-47E 机身的重型攻击直升机。它保留了与“Echo”型号相同的基本机身、燃油系统、动力传动系统、发动机和性能标准,并进行了进一步的结构修改,包括带有加长机头的新驾驶舱和用于特种作战任务的技术增强。它是第一架配备陆军特种作战航空专用通用航空电子架构系统 (CAAS) 的第 160 架直升机。完全集成的数字 CAAS 航空电子设备包结合了升级的软件和硬件,包括有源矩阵液晶显示器 (LCD)、数据处理单元和控制显示单元,以提供高性能

直升机 - Zehr - 航空部门
本传单不能视为合同规范。此处包含的数据如有更改,恕不另行通知。Cobham Aerospace Communications 对任何技术或编辑错误或遗漏概不负责。
直升机教练手册
第 5 章 直升机部件、部分和系统 ................................................................................5-1 简介 ................................................................................5-1 机身设计 ..............................................................................5-2 旋翼叶片设计 ..............................................................................5-2 动力装置设计 ......................................................................5-2 反扭矩系统设计 .............................................................5-2 起落架系统设计 .............................................................5-2 机身 ................................................................................5-2 铝 ................................................................................5-3 优点 .............................................................................5-3 缺点 .............................................................................5-3 复合材料结构 .............................................................5-4 优点 .............................................................................5-4 缺点 .............................................................................5-4 机身 .............................................................................5-4 主旋翼系统 .............................................................................5-4 刚性旋翼系统 .............................................................5-5 半刚性旋翼系统 .............................................................5-5 全铰接式旋翼系统 .............................................................5-8 轴承

多用途海上直升机 - IK4HDQ.net
• 大型机舱允许在内部运载战术车辆、自行车和船只以及部队和装备 • 高功率储备和灵活性使 AW101 成为理想的战术直升机 • “贴地”飞行 • 使用标准燃料进行远程作战 • 可选的飞机生存设备 (ASE) 和枪支用于在高威胁环境中作战 • 低噪音特征 • 环境控制和低振动的机舱可容纳 16 张担架和 4 名医护人员 • 每个担架站的广泛医疗套件可提供先进的生命支持能力 • 1.83 米的机舱高度使医疗队能够轻松地在机舱内工作和移动 • 可通过大型机舱门或后坡道轻松进出机舱
2007 年 4 月 - 奇努克直升机
图 3-15.转弯时空速的变化....................................................................................................3-21 图 3-16.异常姿态—机头高......................................................................................................3-25 图 3-17.异常姿态—机头低......................................................................................................3-25 图 4-1.经度和纬度....................................................................................................................4-3 图 4-2.航路机场图例.............................................................................................................4-6 图 4-3.导航设备和通信框.............................................................................................4-8 图 4-4.空中交通服务和空域信息.............................................................................................4-9 图 4-5.仪表进近图.............................................................................................................4-12 图 4-6.程序和注意事项................................................................................................4-13 图 4-7。终端到达区的基本 T 设计.......................................................................................4-17 图 4-8。剖面图功能.......................................................................................................4-18 图 4-9。着陆最低限度.......................................................................................................4-20 图 4-10。空间内点进近.........................................................................................................4-23 图 4-11。远程高度计设置....................................................................................................4-24 图 4-12。不工作的组件.............................................................................................4-25 图 4-13。东西航向读数,使用外/内刻度.............................................................4-26 图 4-14。使用内刻度读取北航向......................................................................................4-27 图 4-15。从已知点绘制航向线.............................................................................................4-28 图 5-1。CPU-26A/P 计算器侧....................................................................................5-1 图 5-2。CPU-26A/P 计算机的计算器侧.............................................................................5-2 图 5-3。计算时间和距离 ................................................................................................5-3 图 5-4。计算速度 ..............................................................................................................5-3 图 5-5。短距离时间和距离 ................................................................................................5-4 图 5-6。预估出发时间超过一分钟 .............................................................................5-5 图 5-7。预估出发时间少于一分钟 .............................................................................5-5 图 5-8。加仑和磅的换算 .............................................................................................5-6 图 5-9。计算燃料消耗的时间 .............................................................................................5-7 图 5-10。所需燃料 .............................................................................................................5-7 图 5-11。燃油消耗率 ................................................................................................................5-8 图 5-12。真空速计算 ..............................................................................................................5-9 图 5-13。海里、法规和公里相关性 ......................................................................................5-10 图 5-14。内部刻度计算 ......................................................................................................5-10 图 5-15。真实高度计算 ......................................................................................................5-11 图 5-16。乘法 ................................................................................................................5-12 图 5-17。除法 ................................................................................................................5-12 图 5-18。将英尺每海里转换为英尺每分钟 ................................................................................5-13 图 5-19。CPU-26A/P 计算机的风侧......................................................................................5-14 图 5-20。航向和地速......................................................................................................5-15 图 5-21。确定未知风....................................................................................................5-16 图 5-22。确定最有利风的高度....................................................................................5-16 图 5-23。确定作用半径,第一部分................................................................................................5-17 图 5-24。确定作用半径,第二部分................................................................................................5-18 图 5-25。确定作用半径,第三部分................................................................................................5-18 图 6-1。风效应和地速.......................................................................................................6-2 图 6-2。风漂移......................................................................................................................6-2 图 6-3。风漂移角......................................................................................................................6-3 图 6-4。风校正角......................................................................................................................6-3 图 6-5。严重湍流中的仪表扫描(仪表板模糊)........................................................6-4 图 6-6。风切变中的下滑道偏差 ......................................................................................6-7 图 7-1。表面、空间和天波传播......................................................................................7-2 图 7-2。非常(高频)全向范围径向线 ......................................................................7-6 图 7-3。导航到站点 .............................................................................................................7-16 图 7-4。推头.........................................................................................................................7-17 图 7-5。拉尾.........................................................................................................................7-18 图 7-6。跟踪入站.............................................................................................................7-19

先进的火星直升机设计
机智号可能是众多火星飞行器中的第一架。旋翼机增加了前往感兴趣地点的航程和速度。这使得以前被认为在火星上不可行的任务概念成为可能,例如在高海拔、陡峭地形、洞穴/熔岩管地区进行科学调查以及对低层大气进行勘测。美国宇航局艾姆斯研究中心和美国宇航局喷气推进实验室 (JPL) 最近所做的研究表明,旋翼机可以独立或作为探测车和着陆器的助手进行重要的科学研究。机智号一般大小的小型旋翼机可以整合到已经计划发射的任务中。此外,更大的旋翼机可以支持独立的新任务概念,但仍能够调整大小和配置以从遗产进入、下降和着陆 (EDL) 系统部署。其中一个感兴趣的任务概念是确定有机物是否与含粘土或富含二氧化硅的土壤有关。对于这样的任务,着陆器或探测车的小型旋翼机“机器人助手”可以帮助确定莫斯谷等地区的古代沉积物中是否含有生物特征。机智号已证明旋翼机可以相对快速且廉价地开发,并增加可在任何特定任务中执行的科学类型和数量。最近的研究表明,通过使用针对火星运行条件优化的新一代旋翼桨叶,机智号一般大小的旋翼机的性能特征可以显著增强 - 增加其航程、速度和有效载荷能力。旋翼机有可能成为未来所有着陆器和探测车任务的标准附件。本文介绍了一种先进的火星直升机设计,该设计充分利用了机智号火星直升机技术演示器 (MHTD) 的设计传统。
直升机 - Zehr - Aero Division
本传单不能视为合同规范。此处包含的数据如有更改,恕不另行通知。Cobham Aerospace Communications 对任何技术或编辑错误或遗漏概不负责。