XiaoMi-AI文件搜索系统
World File Search SystemLCR

基因组中低拷贝重复
长度至少为 1 千碱基 (kb) 且重复序列同一性超过 90% 的 DNA 旁系同源物被归类为低拷贝重复 (LCR) 或片段重复 (SD)。它们占基因组的 6.6%,聚集在特定的基因组位点上。由于这些重复区域之间的序列同源性很高,它们可能在减数分裂期间错位,导致非等位基因同源重组 (NAHR),并导致结构变异,例如缺失、重复、倒位和易位。当此类重排导致临床表型时,它们被归类为基因组疾病。较大基因组片段的多个副本的存在为进化提供了机会。首先,人类谱系中新基因的产生将导致人类特有的特征和适应性。其次,人类群体之间的 LCR 变异可能导致表型变异。因此,与 LCR 相关的重排倾向应该在进化优势的背景下进行解释。

2022 年 9 月 30 日支柱 3 披露 - 汇丰集团
监管报告的质量仍然是管理层和监管机构的首要任务。我们正在实施一项综合计划,以加强我们的流程、提高一致性并加强对监管报告各个方面的控制。我们已经委托进行了一些独立的外部审查,其中一些是应监管机构的要求进行的,其中包括对我们的信用风险 RWA 报告流程的审查,该审查目前正在进行中。到目前为止,这些审查已通过提高报告准确性提高了 RWA 并改变了流动性覆盖率(“LCR”)。这可能会对我们的一些监管比率产生进一步影响,例如普通股一级资本(“CET1”)和 LCR。
投资者介绍 - 2024 财年第三季度季度业绩
• 在 MEB 基础上,总存款同比增长 18%,环比增长 5%;在 QAB 基础上,总存款同比增长 18%,环比增长 4% • 在 MEB 基础上,零售定期存款 (RTD) 同比增长 17%,环比增长 2%,SA 同比增长 16%,CA 同比增长 5% • 在 QAB 基础上,RTD 同比增长 15%,环比增长 3%,SA 同比增长 16%,CA 同比增长 5%,环比增长 4% • QAB 和 MEB 基础上的 CASA 比率均为 ~42%,在行业中名列前茅 • 2024 财年第三季度的平均 LCR 为 ~ 118%,过去 2 年平均 LCR 流出率提高了 ~600 个基点

使用深度学习神经网络进行手势识别...
图 3.1:手势识别图 ................................................................................................................ 45 图 3.2:ZTM 手套。 .......................................................................................................................... 46 图 3.3:带有多个传感器的 MIT Acceleglove。 ...................................................................................... 47 图 3.4:CyberGlove III .................................................................................................................... 48 图 3.5:CyberGlove II。 .................................................................................................................... 48 图 3.6:5DT 动作捕捉手套和传感器手套 Ultra。 左:当前版本,右:旧版本。[73][74]。 ............................................................................................................................. 49 图 3.7:X-IST 数据手套 ............................................................................................................. 50 图 3.8:P5 手套。 ........................................................................................................................... 50 图 3.9:典型的基于计算机视觉的手势识别方法 .......................................................................... 51 图 3.10:手势识别中使用的相机类型 .......................................................................................... 52 图 3.11:立体相机。 ...................................................................................................................... 52 图 3.12:深度感知相机 ...................................................................................................................... 53 图 3.13:热像仪 ...................................................................................................................... 53 图 3.14:基于控制器的手势 ............................................................................................................. 54 图 3.15:单相机。 ............................................................................................................................. 54 图 3.16:布鲁内尔大学 3DVJVANT 项目的全息 3D 相机原型...................................................... 55 图 3.17:3D 积分成像相机 PL:定焦镜头,MLA:微透镜阵列,RL:中继透镜。 ... 55 图 3.18:方形光圈 2 型相机与佳能 5.6k 传感器的集成。 ................................................ 56 图 5.1:不同的手势。 ...................................................................................................................... 70 图 5.2:系统实现的图解框架。 ............................................................................................. 71 图 5.3:使用 WT 的 10 种不同运动的 IMF。 ............................................................................. 75 图 5.4:使用 EMD 的 10 种不同运动的 IMF。 ........................................................................... 76 图 5.5:WT 中 10 个不同类别的 ROC。 ......................................................................................... 79 图 5.6:EMD 中 10 个不同类别的 ROC。 ......................................................................................... 80 图 5.7:研究中使用的手势。 ......................................................................................................... 84 图 5.8:实施框架。 ........................................................................................................... 84 图 5.9:使用 WT 的 10 种不同动作的 IMF。 ........................................................................... 87 图 5.10:使用 EMD 的 10 种不同动作的 IMF。 ........................................................................... 89 图 5.11:WT 中 10 个不同类别的 ROC。 ......................................................................................... 91 图 5.12:EMD 中 10 个不同类别的 ROC。 ........................................................................................... 92 图 6.1:拔牙前第一人称短距离手部动作 .............................................................................. 97 图 6.2:拔牙后第一人称短距离手部动作 .............................................................................. 99 图 6.3:拔牙后第一人称短距离手部动作 ............................................................................. 100 图 6.4:拔牙前第二人称短距离手部动作 ............................................................................. 101 图 6.5:拔牙后第二人称短距离单人手部动作(LCR) ............................................................. 103 图 6.6:拔牙后第二人称短距离组合手部动作(LCR) ............................................................................. 105 图 6.7:拔牙前第三人称短距离手部动作 ............................................................................. 105 图 6.8:拔牙后第三人称短距离单人手部动作(LCR) ............................................................................................................................................................. 107................................................................ 89 图 5.11:WT 中 10 个不同类别的 ROC。 .............................................................................. 91 图 5.12:EMD 中 10 个不同类别的 ROC。 ........................................................................................... 92 图 6.1:拔牙前第一人称短距离手部动作 .............................................................................. 97 图 6.2:拔牙后第一人称短距离手部动作 .............................................................................. 99 图 6.3:拔牙后第一人称短距离手部动作 ............................................................................. 100 图 6.4:拔牙前第二人称短距离手部动作 ............................................................................. 101 图 6.5:拔牙后第二人称短距离单人手部动作(LCR) ............................................................. 103 图 6.6:拔牙后第二人称短距离组合手部动作(LCR) ............................................................................. 105 图 6.7:拔牙前第三人称短距离手部动作 ............................................................................. 105 图 6.8:拔牙后第三人称短距离单人手部动作(LCR) ............................................................................................................................................................. 107................................................................ 89 图 5.11:WT 中 10 个不同类别的 ROC。 .............................................................................. 91 图 5.12:EMD 中 10 个不同类别的 ROC。 ........................................................................................... 92 图 6.1:拔牙前第一人称短距离手部动作 .............................................................................. 97 图 6.2:拔牙后第一人称短距离手部动作 .............................................................................. 99 图 6.3:拔牙后第一人称短距离手部动作 ............................................................................. 100 图 6.4:拔牙前第二人称短距离手部动作 ............................................................................. 101 图 6.5:拔牙后第二人称短距离单人手部动作(LCR) ............................................................. 103 图 6.6:拔牙后第二人称短距离组合手部动作(LCR) ............................................................................. 105 图 6.7:拔牙前第三人称短距离手部动作 ............................................................................. 105 图 6.8:拔牙后第三人称短距离单人手部动作(LCR) ............................................................................................................................................................. 107
报告标题:回收与废物遏制
为了利用共同工作的好处,Sefton是利物浦城市地区废物与资源合作伙伴关系的7个合作伙伴之一,由6个LCR地方当局和MRWA组成。合作伙伴关系为废物管理事务提供了单一的声音,包括新的废物管理立法的影响,由于住房增长而引起的额外废物以及除区域废物管理的财务压力外,还考虑了环境和气候紧急情况。合作伙伴关系正在合作,为在LCR上实施食物垃圾收集做准备,并将在适当的情况下进行收购诸如食品浪费球童和车辆等资源的共同采购。将分别由每个地方当局进行食物浪费的收集,以与他们现有的收藏方法保持一致,例如内部或第3党的规定。
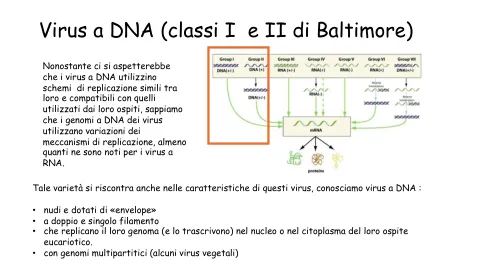
DNA 病毒(巴尔的摩 I 类和 II 类)
• 基因组约为 8 kbp • 它们产生两个同向转录本,其差异剪接产生 8-9 种蛋白质 • 转录可从至少两个启动子开始(P 97、P 670)。第一个是早期基因的启动子,第二个是晚期基因的启动子。 • 来自不同启动子的转录本使用不同的终止子(pAE)• 转录本:• P 97 -pAE 导致蛋白质 E6、7、1、5 的剪接和合成。• P 670 -pALs 导致蛋白质 E4、L1 和 L2 的剪接和合成。 • LCR(长控制区)序列包含与启动子相关的增强子。 • E2 蛋白的完整形式作为启动子(特别是早期启动子)的转录激活剂发挥作用,并与 E1 一起诱导复制(在 LCR 中)。
战略实施 以执行力、独特性和差异化为基础
» 截至 2024 年 3 月 31 日,总存款同比增长 13%,CASA 存款同比增长 3%;这一增长与平均 LCR 存款质量的提高相得益彰(过去 2 年流出率提高了约 500 个基点)

概述和审查
就业与学习包括Sefton@Work的三个服务领域,Sefton成人社区学习服务以及NEET减少和早期干预服务(NREIS)以及其他相关项目,包括建立更好的客户体验和乘以成人的成人计算项目。除NREI外,就业和学习中的所有活动都是外部资助的。摘要职位所有计划目前都在预测和预算范围内运行,包括UKSPF,RESTART,MULLUTLY,AEB,TOWN DEAL,NREIS,LCR市长年轻人保证和LCR测试和学习。通过强大的合同管理可以理解和减轻项目交付的任何风险。目前,违反审计或检查的不合规或财务回扣的风险很低。质量保证系统已经到位,包括矩阵评估,卓越客户服务标准,个人授予身体标准以及SACL的最新Ofsted检查等级在2024年为“好”。Sefton@Work已收到通知,即UKSPF资金的第二年将可以继续为经济不活跃的居民提供服务。虽然资金减少(大约降低了15%),而2024/5年的资金却降低了,但所有从事该项目的员工的薪水将被涵盖,从而避免触发受训练顾问的工作的任何威胁。但是,需要咨询,债务建议,艺术疗法以及其他健康和福祉活动的项目的受益人预算将需要停止。在此期间开展的项目包括链式转换和各种计划同意。政府的白皮书“让英国工作”为未来几年的就业和技能提供了重大变化的框架。这包括宣布一项新的权力下放的计划,该计划针对未经工作的经济不活跃的人们和18至21岁的老年人的青年保证开拓者计划。LCR联合当局已向政府提交了一项大纲计划,以供青年保证开拓者,这是其在交付该计划时的第一个里程碑。最近的头条新闻Sefton@Work继续与雇主和承包商合作,以确定因再生项目和内向投资引起的当地居民的招聘和培训机会。这项工作包括晋升《关怀商业宪章》。LCR增长总监小组将监督一项工作,以在接下来的几个月中,涉及DWP连接到工作计划的推出以及LCR的未来就业支持形状。希望这将使LA的角色成为这些计划的中心,作为交付组织和战略合作伙伴以及免费支持服务的提供者。