XiaoMi-AI文件搜索系统
World File Search SystemLan

NEC NC1200C
1 x LAN 端口 [RJ-45] 1 x USB 端口 [Type A] 1 x 串行端口 (RS-232C) [D-sub(9 针) 1 x 通用 I/O [D-sub (37 针)] 1 x 3D 通用 I/O (1 x D-sub [15 针]) 1 x 远程控制连接器
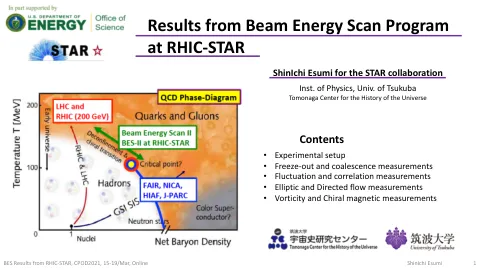
RHIC-STAR 束流能量扫描计划的结果
(3) [ 流动 ] • Prabhupada Dixit : 奇异和多奇异强子的产量和流动 • Shaowei Lan : 已识别粒子的各向异性流测量 • Xionghong He : 3 GeV FXT Au+Au 碰撞中的轻核产生和流动

空间和防御应用的高功率密度热电池
引言由于其成熟度,可靠性和高功率密度,在国防工业中众所周知,在“一击”系统中使用的热电池是众所周知的。他们不需要充电,没有加热,没有用于运输/存储的物流约束,也没有专用的地面安装。热电池提供任何储备电池技术的最高功率密度,并且不受压力,温度,湿度等环境条件的影响。它们可用于并联或系列连接的几组电池组中,从而提供模块化。可以在发射之前激活热电池,并在无负载的“空闲时间”中安全地坐在高功率放电之前的几分钟内。拥有如此悠久的记录,热电池是支持空间和防御工业中不断增长的需求的绝佳解决方案。在国防行业的先前应用中已证明了将LAN阳极用于热电池的使用。lan由纯锂阳极组成,在机械上固定以允许实施实施,而无需将锂与另一种材料合并。由于LAN阳极的固有性能特征,它已用于需要在相对较小的电池量内进行高功率输出的应用。设计注意事项电流密度:热电池通常以1A/cm2的稳态电流密度运行,在数百毫秒内持续时间短,持续时间短的高电流脉冲为10A/cm2。解决此问题的主要手段是通过实现满足高电流需求的实际实现需要增加电池量,并具有增加电压和电池表面积的目标。

kuantum kriptolojisi ve sibergüvenlik量子...
摘要 - 这项研究的目的是解释开发量子技术如何影响使用量子算法的网络安全系统中使用的加密系统。为此,首先,某些算法通常在现代密码学中使用。稍后,有关量子计算机中使用的海岸和Grover算法如何影响现代加密中使用的算法的信息。信息和通信技术方面的最新发展导致了生成和存储的信息的数量和速度大大提高。信息的增加也揭示了许多安全问题。企业,银行,政府机构和其他组织的安全系统基于解决困难的数学问题。解决这些问题也需要很长时间,即使使用了最强大的计算机和现代算法。表明,在文献中,量子计算机对当今的安全构成了巨大危害。只有科学家预测,量子计算的发展速度将超过预期,并揭示了巨大的安全弱点。因此,在不久的将来,许多组织的加密系统将面临严重的网络安全问题。国家和私营部门都必须已经准备好通过预测这些危险来解决将来可能出现的安全问题。

基于进化的强效泛疫苗的构建
Guo 1 , Yongbing Pan 3 , Xiaoli Wu 3 , Yimin Yang 3 , Zhaofei Jing 3 , Yongzhong Jiang 4 , SARS-CoV-2 Vaccine Task Force Group 1,2 , Yu Chen 1,2 , Huan Yan 1,2 , Yu Zhou 1 , Ke Xu 1,2,* , Ke Lan 1,2,5*
新墨西哥州拉斯克鲁塞斯市战略规划
简介 这项战略规划工作使社区成员和市领导有机会通过确定需要改进的优先事项来确定未来成功的关键因素,这些改进优先事项与“提升拉斯克鲁塞斯”计划中包含的短期目标和举措以及市议会确认的新目标保持一致。战略计划的基础体现在愿景、使命和组织价值观中。这些要素是确定优先事项和目标的基础,并指导市政府工作人员的工作。目标和优先事项的实施应经过深思熟虑且透明地进行,市议会应定期审查以确保取得进展。管理合伙人公司 (Management Partners) 推动了这项战略计划的制定,该公司是一家专门协助美国地方政府的公司。

Revcom-09252024Rec.pdf
p802.11bh/6.0 IEEE信息技术标准草案 - 系统本地和大都市区域网络之间的信息交换和信息交换 - 特定要求 - 第11部分:无线LAN中型访问控制(MAC)和物理层(PHY)的(PHY)规格1:随机和更改MAC的操作:批准为p802.11 p802.11 prestion 2.

合作法院的语言援助计划 (LAP) ...
制定口译员名单并确保口译服务 接收和跟踪语言援助请求; 根据需要开展外展活动,解决口译服务方面的差距; 提供信息以协助 LEP 和 D / HH / DB 个人确保获得语言访问服务; 协助或推荐律师、司法伙伴、缓刑、EHM、进行心理评估的医生、法院工作人员以及其他相关人员,以确保为其客户和选民获得语言访问服务; 回答来自 L EP 和 D / HH / DB 个人以及广大公众的问题,考虑到法院可用的语言访问服务,包括法院的语言访问资源,如翻译材料、口译员名册、语言识别卡以及本计划中确定的其他资源。