XiaoMi-AI文件搜索系统
World File Search SystemLocating

游戏地点:在 Red Dead Redemption 2 中定位游戏场所
摘要 在《电子游戏空间》(2009)中,迈克尔·尼切提出了电子游戏中“位置性”的三个指标:身份、自我激励和自我组织的行动,以及记忆痕迹(191-201)。我们认为位置性的概念与戏剧和表演研究中对地点和场地的理解(即特定场地表演)密切相关或有重叠。在这里,我们通过具有人机交互偏见的表演研究和游戏设计研究之间的分析对话,阐明了 Rockstar Games 的《荒野大镖客 2》(RDR2)中位置性和场地性的想法(并分析了体验)。通过仔细阅读游戏体验(Bizzocchi 和 Tanenbaum,2011),我们个人体验了超过 30 小时的 RDR2 游戏,同时做笔记、录音和截取屏幕截图。在我们个人分析期间,我们定期会面,比较笔记,讨论值得注意的游戏时刻并分享分析见解。在游戏研究和性能研究的交叉点上,我们想问,在物理、物质和材料空间中,美学/情感体验的理论表达能在多大程度上发展——并进一步细化——我们对当代电子游戏中场所体验(以及设计)方式的理解。为此,我们提出了游戏场所这一术语,作为表达本文将定义的场所、体验和游戏之间的情感关系的一种方式。关键词 场所、空间、地点

ATP 3-09.12现场炮兵与武器定位...
1-4。定位方法组织指挥官和员工的努力来完成关键的目标要求。见图1-1。定位是指挥官决策的产物,并确定了开发有效的信息收集和情报分析工作的要求。它可以帮助工作人员和目标工作组决定必须获得和参与哪些目标。针对工作组的组成和结构可以因由单位的指挥官和标准操作程序确定。在整个出版物中都讨论了针对工作组,他们的未来和化妆。定位开发用于参与目标的选项。目标是执行因可能参与或其他操作的威胁函数执行函数的实体或对象(JP 3-60)。
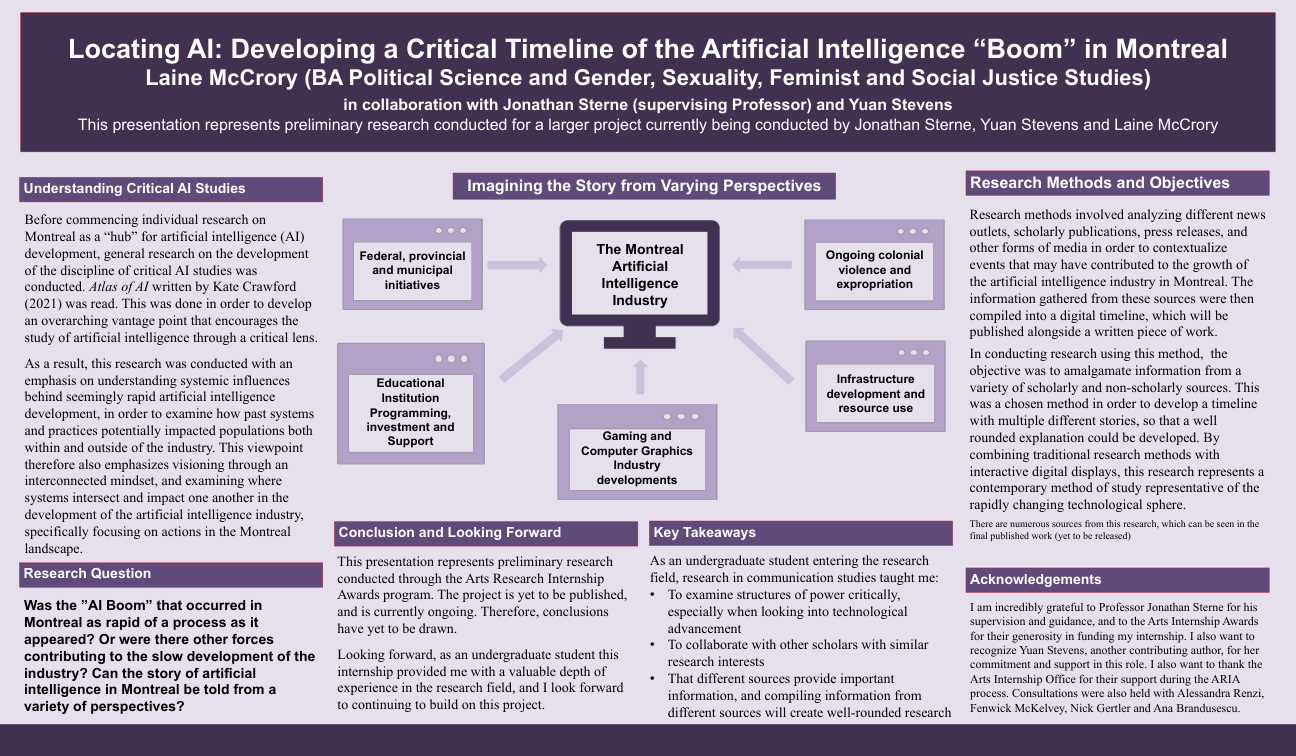
定位人工智能:制定蒙特利尔人工智能“繁荣”的关键时间表
因此,本研究的重点是了解人工智能快速发展背后的系统性影响,以研究过去的系统和实践如何影响行业内外的人群。因此,这一观点还强调通过互联思维进行展望,并研究人工智能行业发展中系统交叉和相互影响的地方,特别关注蒙特利尔地区的行动。

Splu-Robonlp 2024空间上的第四届研讨会...
视觉接地(VG)旨在找到与给定自然语言表达式相匹配的前景实体。经典VG任务的先前数据集和方法主要依赖于先前的假设,即给定表达式必须从字面上参考目标对象,这极大地阻碍了代理在现实情况下的实际部署。由于用户倾向于为所需的对象提供基于意图的表达,而不是涵盖所有详细信息,因此代理商有必要解释意图驱动的说明。因此,在这项工作中,我们迈出了一个意图驱动的视觉语言(V-L)的一步。为了将经典的VG推广到人类意图解释,我们提出了一个新的意图驱动的视觉接地(IVG)任务,并构建一个以自由形式的意图来确定的大规模IVG数据集。考虑到实践代理需要在各种场景中移动并找到特定目标才能实现基础任务,因此我们的IVG任务和意图数据集将多个scenario感知和以Egipentric视图的关键属性考虑到了考虑。此外,将各种类型的模型设置为实现我们的IVG任务的基准。在我们的意图数据集和基线上进行的实验实验证明了我们对V-L领域方法的必要性和效率。为了朝着这个方向促进未来的研究,我们新建的数据集和基线将在https://github.com/rubics-xuan/ivg上公开获得。
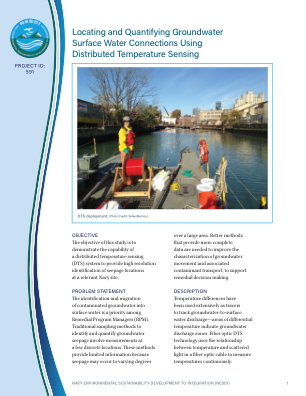
使用分布式温度传感定位和量化地下水地表水连接
海军优势 使用光纤 DTS 技术可为海军带来多种潜在优势。首先,它是唯一能够高分辨率识别大面积渗漏的技术。这可验证并改进地下水和污染物运输模型。它可精确定位值得关注的区域并排除渗漏程度极低或没有渗漏的区域。例如,最近一项 50 英亩的 DTS 研究发现,渗漏发生在不到 5% 的场地面积内。这种高分辨率数据可提高后续调查的成本效益,并让监管机构更加确信该场地的特征已得到充分描述。
无人机自动着陆系统集成了野生环境中的定位,跟踪和降落
无人驾驶汽车(UAV)的抽象高可利用性着陆系统已广泛关注它们在复杂的野生环境中的适用性。准确的定位,灵活的跟踪和可靠的恢复是无人机着陆的主要挑战。在本文中,提出并实施了一个新型的无人机自动着陆系统及其控制框架。它由环境感知系统,无人接地车辆(UGV)以及斯图尔特平台定位,跟踪和自动恢复无人机。首先,开发基于多传感器融合的识别算法是为了借助一维转盘实时定位目标。其次,提出了由UGV和着陆平台组成的双阶段跟踪策略,以动态跟踪着陆无人机。在广泛的范围内,UGV负责通过人工电位场(APF)路径计划和模型预测控制(MPC)跟踪算法进行快速跟踪。虽然在平台控制器中采用了梯形速度计划来补偿UGV的跟踪误差,但在较小范围内实现了对无人机的精确跟踪。此外,一种恢复算法,包括姿态补偿控制器和阻抗控制器,是为Stewart平台设计的,可确保无人机的水平和合规降落。最后,广泛的模拟和实验致力于验证开发系统和框架的可行性和可靠性,这表明它是在野生环境(例如草原,斜坡和雪)中无人用自动降落的卓越案例。

使用低精度异构声纳浮标传感器的纯角度测量定位水下目标
摘要:本文考虑了水下目标的定位,其中放置了许多声纳浮标来测量目标声音的方位。声纳浮标的方位精度非常低,例如 10 度。在实践中,我们可以使用多个异构声纳浮标,这样传感器噪声的方差可能与另一个传感器的方差不同。此外,一个传感器的最大感应范围可能与另一个传感器的最大感应范围不同。如果传感器检测到目标的方位,则真实目标必须存在于传感器的感应范围内。为了基于低精度的方位测量来估计目标位置,本文介绍了一种基于多个虚拟测量集 (VMS) 的新型目标定位方法。这里,每个 VMS 都是考虑到每个声纳传感器的方位测量噪声而得出的。据我们所知,本文在基于低精度的异构声纳浮标传感器定位目标的 2D 位置方面是新颖的,考虑到传感器的最大感应范围。通过使用计算机模拟将所提出的定位方法与其他最先进的定位方法进行比较,验证了所提出的定位方法的优越性(同时考虑时间效率和定位精度)。

通过手性对称性修复和霍金 - unruh效果
编辑器:F。Gelis QCD与字符串模型之间的关系是探索Quarks之间相互作用潜力的宝贵观点。在这项研究中,我们研究了与加速观察者所经历的临床相关的手性对称性的恢复。利用Schwinger模型,我们分析了Quark-Antiquarks之间的弦或染色体孔管的临界点,而夸克之间的分离增加。在这项研究中,确定Quark-Antiquark染色器式孔管或弦弦断裂的临界距离为𝑟= 1。294±0。040 FM。与此临界点相对应的加速度和未温度的温度表示系统的手性对称性从断裂状态到恢复状态的过渡。我们对临界加速度的估计值(𝑎=1。14×10 34 cm/s 2)和未温度(𝑇= 0。038 GEV)与以前的研究保持一致。此分析在夸克相互作用的背景下,阐明了手性对称性恢复,效果的效果以及弦乐或铬发射器的破裂之间的相互作用。
文章 使用低精度异构声纳浮标传感器的纯角度测量来定位水下目标
摘要:本文考虑了水下目标的定位,其中放置了许多声纳浮标来测量目标声音的方位。声纳浮标的方位精度非常低,例如 10 度。在实践中,我们可以使用多个异构声纳浮标,这样传感器噪声的方差可能与另一个传感器的方差不同。此外,一个传感器的最大感应范围可能与另一个传感器的最大感应范围不同。如果传感器检测到目标的方位,则真实目标必须存在于传感器的感应范围内。为了基于低精度的方位测量来估计目标位置,本文介绍了一种基于多个虚拟测量集 (VMS) 的新型目标定位方法。这里,每个 VMS 都是考虑到每个声纳传感器的方位测量噪声而得出的。据我们所知,本文在考虑传感器的最大感应范围的情况下,基于低精度的异构声纳浮标传感器对目标的 2D 位置进行定位方面是新颖的。通过使用计算机模拟将所提出的定位方法与其他最先进的定位方法进行比较,验证了所提出的定位方法的优越性(同时考虑时间效率和定位精度)。
