XiaoMi-AI文件搜索系统
World File Search SystemMile
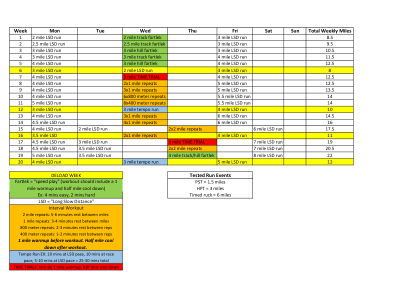
20 周跑步计划
一周 周一 周二 周三 周四 周五 周六 周日 每周总里程 1 2 英里 LSD 跑步 2 英里跑道法特莱克跑 3 英里 LSD 跑步 8.5 英里 2 2.5 英里 LSD 跑步 2.5 英里跑道法特莱克跑 3 英里 LSD 跑步 9.5 英里 3 3 英里 LSD 跑步 3 英里山地法特莱克跑 3 英里 LSD 跑步 10.5 英里 4 3 英里 LSD 跑步 3 英里跑道法特莱克跑 4 英里 LSD 跑步 11.5 英里 5 4 英里 LSD 跑步 3 英里山地法特莱克跑 4 英里 LSD 跑步 12.5 英里 6 3 英里 LSD 跑步 2 英里 LSD 跑步 3 英里 LSD 跑步 8 英里 7 4 英里 LSD 跑步 3 英里计时赛 4 英里 LSD 跑步 12.5 英里 8 4 英里 LSD 跑步 2x1 英里重复 5 英里 LSD 跑步 12.5 英里9 4 英里 LSD 跑步 3x1 英里重复 5 英里 LSD 跑步 13.5 10 4 英里 LSD 跑步 6x800 米重复 5.5 英里 LSD 跑步 14 11 5 英里 LSD 跑步 8x400 米重复 5.5 英里 LSD 跑步 14 12 3 英里 LSD 跑步 3 英里节奏跑步 4 英里 LSD 跑步 10 13 4 英里 LSD 跑步 3x1 英里重复 6 英里 LSD 跑步 14.5 14 4.5 英里 LSD 跑步 4x1 英里重复 6 英里 LSD 跑步 16 15 4 英里 LSD 跑步 2 英里 LSD 跑步 2x2 英里重复 6 英里 LSD 跑步 17.5 16 3.5 英里 LSD 2x1 英里重复 4 英里 LSD 跑步 11 17 4.5 英里 LSD 跑步 3 英里 LSD 跑步 3 英里计时赛 7 英里 LSD 跑步 19 18 4.5 英里 LSD 跑步 3.5 英里 LSD 跑步 2x2 英里重复 7 英里 LSD 跑步 20.5 19 5 英里 LSD 跑步 3.5 英里 LSD 跑步 4 英里跑道/山地法特莱克训练 8 英里 LSD 跑步 22 20 4 英里 LSD 跑步 3 英里节奏跑 5 英里 LSD 跑步 12

理事会特别会议 - 2025 年 1 月 25 日 - 议程 - Pdf
从威拉米特子午线以东 40 区第 4 乡镇南侧第 18 区西北区的西北区 [角] 开始,向东延伸一英里半;然后向南延伸一英里四分之一;然后向东延伸一英里四分之一;然后向南延伸一英里四分之一;然后向东延伸一英里半;然后向西延伸一英里四分之一;然后向南延伸一英里;然后向西延伸四分之三英里;然后向北延伸一英里四分之一;然后向西延伸四分之三英里到达威拉米特子午线以东 39 区第 4 乡镇西南区的东南区西北角;然后向北延伸约八分之七英里到凯瑟琳溪;然后以凯瑟琳溪为线向东延伸四分之一英里;然后向北约八分之三英里,到达第 13 区中心、第 4 乡镇南、威拉米特子午线以东第 39 区;然后向东一四分之一英里;然后向北一四分之一英里;然后向东一四分之一英里;然后向北一四分之一英里到达起点。
12 周 SURT 前培训计划概述一般准则
1 英里热身(无计时) 1 英里@短节奏 1 英里轻松(无计时) 1 英里@短节奏 1 英里轻松(无计时) 1 英里@短节奏 1 英里冷静(无计时) 热身和冷却 英里速度缓慢且无计时。除了这些热身/冷却英里之外,您仍然需要进行一般热身和冷却。短节奏速度比您的 5 英里评估时间慢 20 秒。中速速度比您的 5 英里评估时间慢 40 秒。

马库姆县专员委员会
基础设施/经济发展委员会联合主席放弃的项目 与 Teltow Contracting 签订的合同 / 与 Shelby 和 Macomb Townships 签订的成本分摊协议 委员会建议 - 动议 Brown 提出动议,Sabatini 支持该动议,建议理事会批准与 Teltow Contracting 签订投标和承包商合同以及与 Shelby 和 Macomb Townships 签订的成本分摊协议,用于铺设从 25 Mile Road 到 26 Mile Road 的 Hayes Road;此外,指示立即将理事会行动的副本送达县行政办公室。以下委员向道路部主任 Bob Hoepfner 提问:Carabelli。主席 Miller 要求对该动议进行表决,动议获得通过。与 Dan's Excavating 签订合同 / 与 Macomb Township 签订成本分摊协议委员会建议 - 动议 Sabatini 提出动议,Marino 支持该动议,建议委员会批准与 Dan's Excavating 签订投标和承包商合同以及与 Macomb Township 签订成本分摊协议,以在 25 Mile Road 和 Romeo Plank 交叉口处建造环形交叉路口;此外,指示立即将委员会行动的副本送交县行政办公室。以下委员向道路部主任 Bob Hoepfner 提出了问题:Carabelli 和 Smith。主席 Miller c
莫桑比克运输案例研究-DV3 ...
3PL Third Party Logistics, a private transport supplier 4PL Fourth Party Logistics, a logistics firm that organises and contracts 3PL AAER Adopt, Adapt, Expand and Respond, a framework to analyse innovation scale-up BMGF Bill and Melinda Gates Foundation CBM Cost per Cubic Meter CHE Current Health Expenditure CHEGAR Commodities for Health Ensuring Guaranteed Access and Reliability CMAM Central Medical Stores COMSA Countrywide Mortality Surveillance for Action system FRELIMO The ruling party in government GDP Gross Domestic Product GPS Global Positioning System HIV Human Immunodeficiency Virus IMF International Monetary Fund LMSC Last Mile Supply Chain programme MISAU Ministry of Health NGO Non-Governmental Organisation PELF Strategic Plan for Pharmaceutical logistics PLM Project Last Mile RENAMO The opposition party in government SPS Provincial Health Departments UNFPA United Nations Population Fund UNICEF United Nations儿童基金美国国际发展局
NJTA预算主工作文件DOC 2024否决权后预算
通行收入是营业收入的百分比。。。。。。。。。。。。。。。。。。。。。28个工作保证金比率。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。29成本回收率。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。30平均收费/交易 - 收费公路。。。。。。。。。。。。。。。。。。。。。。。。。。。。31平均收费/交易 - 大路。。。。。。。。。。。。。。。。。。。。。。。。。。。。31通信收入/车道英里。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。32运营成本/车道英里。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。33债务/车道英里。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。34
新闻通讯-Feeit -UKIM
根据电气工程和信息技术学院的电气工程和信息技术学院的教学和科学系统工程和机器人技术的所有教学科学技术,自动化和机器人技术的选择,以选择教师的所有教学学士学位,根据电气工程和信息技术学院,在所有教学科学系统,自动化和机器人技术中选择教师。在系统工程,自动化和机器人技术教学科学领域的所有教学科学领域的教师,以及教学科学委员会编号的决定。02-2100/4,于21.22.2022通过,成立了一个审查委员会:电气工程和信息技术学院副教授Vesna Ojleska Latkoska博士,总裁Mile Stankovski博士,Full,Full Taskovski是电气工程和信息技术学院的完整教授,会员。作为审查委员会的成员,在审查了提交的文档后,我们提交了以下和提出的竞争,以在科学领域的所有教学科学领域中选择教师21808-系统性工程,自动化和机器人技术。Gorjan Najinski博士。1。b和教育数据Gorjan Nadzinski于1988年10月28日出生在Skopje,他于2003年毕业,并于2007年获得了自然的体育馆,并取得了巨大的成功。在此期间,他是区域和州数学和物理比赛的定期参与者,获得了几个第一奖。Mile Stankovski博士。Mile Stankovski博士。在2007/2008学年,候选人在Skopje的电气工程和信息技术学院(FEEIT)参加了完整的时间研究,朝着计算机系统工程和自动化方向上。在教师教育期间,他在每个研究年度成功毕业,平均9多。在同一教师中,他获得了一定程度的研究生工程师,并从事题为“分布式微处理器定位的研究生工作”。平均学习年级为9.59。在2011/2012学年,候选人在计算机系统工程和自动化的方向上招募了第二个FeeIT周期,并通过最高10.00级的所有考试。硕士论文的标题为:“ Robus Management管理随机延迟的效果和网络自动系统中数据包丢失的影响”在2013年4月4. 9. 9. 2013年的指导下。在2013/2014学年,他参加了SS博士学校的第三个研究周期。Cyril和Methodius”,关于电气工程和信息技术计划,并通过最高级别10.00的所有考试。关于该主题的博士论文:“在工业网络自动管理系统中为噪声具有抗噪声的新协议的开发”于2018年4月13日在教授的指导下为其辩护。Mile Stankovski博士。 在学习期间,他在“ Blakom” Dooel -Skopje和“ Makstil”的公司中进行了多年练习。Mile Stankovski博士。在学习期间,他在“ Blakom” Dooel -Skopje和“ Makstil”的公司中进行了多年练习。还是国际会议组织的组织团队的积极参与者,欧洲电力电子电力电子和运动控制(ERE-ERE),2010年,国际电子会议,电信,自动和
vs2
每次电荷剩余距离范围。rpm电流旋转速度。旅行当前骑行距离。打开打开调整模式1。在连续时间(例如4秒)将远光灯开关(即远光指示灯闪烁3次); 2。此时,当前的显示模式(驾驶范围/单里程/旋转速度)正在闪烁,表明电动机已进入调整模式;显示开关(驾驶范围 /行程范围 /旋转速度)打开打开调整模式,然后打开或关闭远光灯开关以切换显示模式(驾驶范围 /单程 /旋转速度)一次。以这种方式循环开关。如果不处于行程状态,则卸下单程里程;调试到单里程状态(TRIP),在4秒内打开和关闭6次远光灯,此时乐器的单程里程返回为零。切换显示单元(km and Mile,km/h和mph)缩回侧支架,并启用开关调整模式。从OFF(P齿轮指示灯)切换“停车制动器手柄开关”到ON(2秒内),然后切换到OFF,从而切换显示单元(km and Mile,km/k/h和mph);切换“停车