XiaoMi-AI文件搜索系统
World File Search SystemMob

实时警报、动态 GPS 跟踪和监控...
船舶是大多数国家维持海洋经济最重要的交通工具。海岸巡逻是国家防止走私和其他危险沿海活动的重要任务。然而,船上人员和海岸警卫队人员在海中溺亡的不幸事故时有发生。为了挽救落海人员的生命,大多数国际搜寻是通过卫星搜寻、直升机救援和派遣船只进行的。这些不仅耗时而且效率低下。为此,我们在本文中提出了一种落水人员(MOB)实时报警、动态全球定位系统(GPS)跟踪和监控系统。该系统由可穿戴传感辅助设备、模块化远程接入点 (LoRa AP)、物理电围栏和中央控制系统四部分组成,以及三种检测和防范 MOB 的方法。这些方法包括使用可穿戴传感辅助设备实时通知 MOB、基于船舶大小的虚拟电围栏监控以及由船舶周围的物理电围栏触发的即时通知。如实验室测试和实际海上测试所示,本研究开发的三种 MOB 传感方法可以执行即时检测和通知操作。因此,我们展示了一种由失事船舶本身实时检测 MOB 并及时提出救援行动的方法。

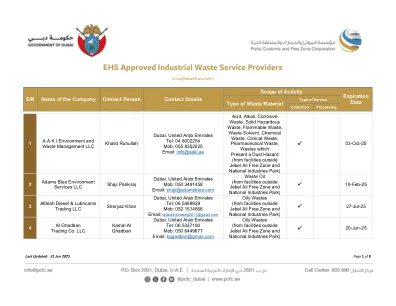
EHS 认可的工业废物服务提供商 - 迪拜
迪拜,阿拉伯联合酋长国 手机:055 2592034 / 055 8219653 邮箱:manzoor.hussain24567@gmail.com

第 46 工程兵营 - 木工/石工中士
2024年3月26日 — 第46工程兵营。木工/石工 SGT。水平常数 SGT。室内电工。首席消防员。MOB/CNTRMOB/SURV NCO。水管工/管道装配工。

天花/猴痘疫苗 (JYNNEOS™)
JYNNEOS™ 的接种时间通常不受其他疫苗接种时间的限制。然而,一些患心绞痛(心肌炎症)风险较高的人,包括青少年或年轻男性,可能需要在接种 JYNNEOS™ 疫苗后等待 4 周才能接种某些 COVID-19 疫苗。如果您因接触猴痘而获准接种 JYNNEOS™,那么即使您最近接种了 COVID-19 疫苗,也应该接种疫苗。
富含硼的金属二吡啶的非平衡反应性...
图1:富含硼的六角形面孔的热力学的从头开始。(a)BOB 2表面的表面相图,其额外表面硼的覆盖范围与B大典型的全局优化采样的覆盖范围不同。虚线标记了与B富集相关的化学潜力。(b)在与B富集相关的化学势方面,采样表面相的大规范自由能。(c)三个表面相(B 0,B 1/9和B 1/3)结构的顶部和前视图,可以通过硼 - 富集来制备。额外的硼原子以黄色圆圈标记。原子的颜色代码:mo - 蓝色,b - 粉红色。
无标题 - MyNavyHR
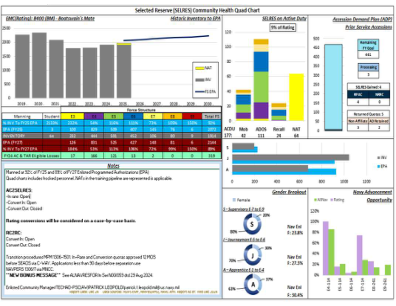
2023年8月30日 — Active. 107. 831. 521. 426. 136. 77. 3. 2101. ACDU Mob ADOS. Recall. NAT. 9. 5. 96 INV To FY25 EPA. 170%. 37%. 117%. 116%. 79%. 101%. 367%. 85%. 172: 80.