XiaoMi-AI文件搜索系统
World File Search SystemMob
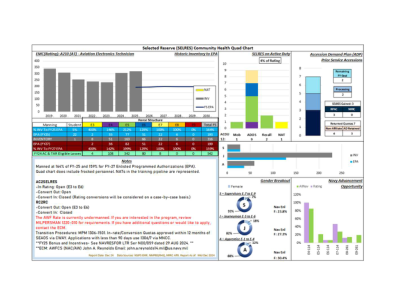
SELRES 社区健康四分图 - MyNavyHR
2022 年 10 月 15 日 — 报告日期:10 月 22 日数据来源:NSIPS EMF、NMPBS(RHS)、已签署的 2022 年秋季 EPA、NRC CTO 报告截至:2022 年 10 月中旬。14.12.10.8.00.6.2.ACDU Mob。
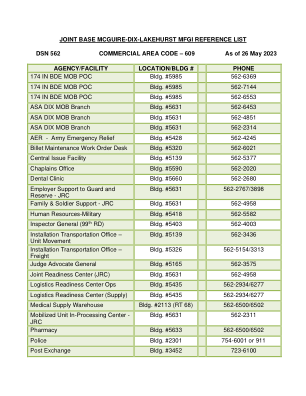
赞美诗-DIX-PLO(500-5a)
联合基地麦圭尔-迪克斯-莱克赫斯特 MFGI 参考清单 DSN 562 商业区号 – 609 截至 2023 年 5 月 26 日 机构/设施位置/建筑号 电话 174 IN BDE MOB POC 建筑号 #5985 562-6369

div> dava Striker™návodk obsluze
Testing of the current location as a route point ................................................... 16 Creating a route point in a different position .............................................. 16 Edit of the stored route point ...... 16 Positions .................... 16 Navigation to the route point ................................. 17 Removing route point or mob .........................................积分....... 17分享路线点和不同设备上的路线......................................................................................................................................................................................................................................................................................................................................................................................................... 17
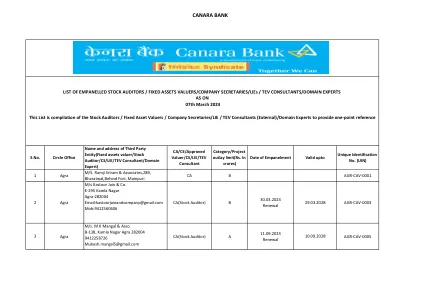
网站-截至 2024 年 3 月 7 日的入选估价师名单.xlsx
M/s Sanjay Singhal & Associates,Prop:Sanjay Kumar Singhal 93 Raghav Puram Lane no 2 Bhuteshwar Mandir road near Tota Chowk Saharanpur- 247001 Uttar Pradesh 手机:9412133190/9997348400 电子邮件:sanjaysca@rediffmail.com Sanjaysinghal.2013@rediffmail.com
照片被砍成碎片;圣人的雕像从壁龛上掉下来,撞成了碎片;祭坛被砍成碎片,而圣经
画像被撕成碎片;圣人的雕像从壁龛上掉下来,被打得粉碎;祭坛被砍成碎片,巨大的管风琴被毁坏;弥撒书和手稿被毁坏,华丽的长袍被踩在脚下,鲁莽的暴徒用涂油膏国王的圣油弄脏了他们的鞋子。到了午夜,傍晚时分,欧洲大陆最美丽的大教堂之一只剩下一个空壳。安特卫普市民会用生命来守护的宝藏,以免遭到外国敌人的侵害,却在不到一百名安特卫普最坏的人的手中,在几个小时内就消失了。无论是地方官员还是军队都没有阻止他们。胜利让他们疯狂不已,每个野兽都抓起火把,冲过街道,喊着熟悉的“乞丐万岁!”所有清醒的人听到声音都打了个寒颤,掏出枪,仔细检查门锁。但没有人受伤;被屠杀的只是圣像。两天两夜,疯狂的暴徒像龙卷风一样席卷街道,只留下一片废墟。三十座教堂被洗劫一空;许多修道院珍贵的图书馆被烧毁,僧侣和修女被赶到街上。地方官员仍然闭口不谈,担心暴徒厌倦了圣像后会去攻击市民。菲利普二世听说这件事后勃然大怒
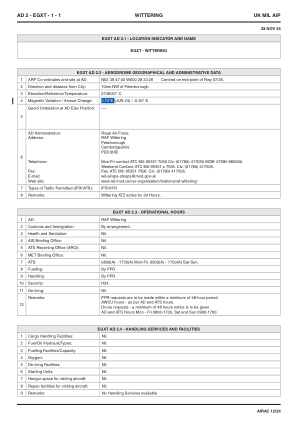
AD 2 - EGXT - 1 - 1 英国军用 AIP WITTERING
英国皇家空军。RAF Wittering Peterborough Cambridgeshire PE8 6HB。周一至周五联系 ATC Mil:95351 7050 民事:(01780) 417050 MOB:07580 882090。周末联系:ATC Mil:95351 x 7505。民事:(01780) 417505。传真:ATC Mil:95351 7506。民事:(01780) 417506。wit-airops-stnops@mod.gov.uk www.raf.mod.uk/our-organisation/stations/raf-wittering/

SSTL 将 THEOS-2 SmallSAT 运往泰国 GISTDA
媒体联系人:Joelle Sykes,SSTL 公关经理 电话:+44 (0)1483 804243 手机:07775 000853 邮箱:jsykes@sstl.co.uk Twitter @SurreySat Instagram @surreysatellites #DoingSpaceDifferently 关于 SSTL 萨里卫星技术有限公司 (SSTL) 是最初的 New Space 叛逆者,并且是

一般AI(Genai) b.echot ece(IoT)方案IIII IIII III
关于该部的Nagpur计算机科学与工程部提供了B.Tech。计算机科学和工程,人工智能与机器学习,数据科学和分析以及人类计算机互动与游戏技术的计划。部门为全日制和兼职博士提供了机会。计划涵盖核心和新兴领域的研究。该部门配备了所有最先进的实验室,并配备了最新的技术和平台以及一流的计算设施。该部门致力于跨学科领域的创新和研究。该部门不断地付出了宝贵的努力,以提供最新的最新课程,该课程可用于解决行业和社会的实时问题。有关该计划的生成AI的六个月在线认证计划,于2025年1月10日启动。为IT专业人士,CS毕业生,研究人员和教育工作者量身定制,对Genai充满热情,该计划提供了以行业为中心的课程和学术严谨的独特融合,并在80小时的现场互动会议上由学术界和行业的杰出演讲者进行。该综合计划旨在为参与者提供数学原理的坚实基础,ML/DL对掌握生成AI必不可少。课程涵盖了各种各样的主题,包括神经网络,卷积和序列模型,GAN,变压器和LLM。该计划通过为AI创新量身定制的工具,平台和编程语言强调实用应用。参与者将深入研究尖端领域,例如扩散模型,视觉模型,检索效果的生成以及及时的工程和RLHF,并进行微调。专注于实践学习,参与者将进行现场教程,动手会议和严格的任务。该计划以一个顶峰项目为顶点,并补充了10个任务和5个与行业相关的项目。IIIT Nagpur的认证,再加上职业指导,面试准备和网络机会,可确保参与者能够在AI领域中出色。 此认证是寻求促进其在Genai的职业并推动影响力创新的专业人士,研究人员和爱好者的理想途径。 加入我们,释放Genai的变革潜力并塑造智能系统的未来。 联系人详细信息:Amol Bhopale博士(电子邮件ID:abhopale@iiitn.ac.in,mob。 9730236396 Nileshchandra Pikle博士(电子邮件ID:npikle@iiitn.ac.in,Mob。 7276834418)IIIT Nagpur的认证,再加上职业指导,面试准备和网络机会,可确保参与者能够在AI领域中出色。此认证是寻求促进其在Genai的职业并推动影响力创新的专业人士,研究人员和爱好者的理想途径。加入我们,释放Genai的变革潜力并塑造智能系统的未来。联系人详细信息:Amol Bhopale博士(电子邮件ID:abhopale@iiitn.ac.in,mob。9730236396 Nileshchandra Pikle博士(电子邮件ID:npikle@iiitn.ac.in,Mob。7276834418)