XiaoMi-AI文件搜索系统
World File Search SystemModel

型号GPD
DPDT-8A-250V.AC • Engine run • Common controller trouble • Charger #1 & Charger #2 failure • Pressure transducer fault • Common engine trouble • High engine temperature • Fail to start • Fuel injection malfunction** • ECM selector switch in alternate position*** • PLD low suction pressure • Common pump room trouble (field re-assignable)* • Low fuel level • High fuel level • Fuel tank leak • H-O-A selector switch in关闭或手•免费(现场编程)*
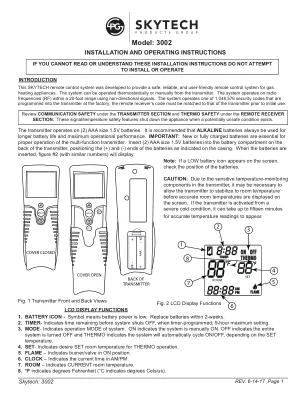
型号:3002
每个发射器都使用唯一的安全代码。有必要按接收器上的学习按钮,以便在初始使用时接受发射机安全代码,如果更换电池,或者是从经销商或工厂购买的替换发射器时。为了使接收器接受发射器安全代码,请确保接收器上的滑动按钮位于远程位置;接收器将不会了解幻灯开关是否在开或关闭位置。位于接收器前面的学习按钮;在标有学习的小孔内。使用小螺丝刀或圆头架的末端轻轻按下并释放孔内的黑色学习按钮。发布“学习”按钮时,接收器会发出可听见的“蜂鸣声”。接收器发出哔哔声后,按发射机模式按钮并释放。接收器将发出几种哔哔声,表明发射器的代码已被接受到接收器中。控制安全代码匹配过程的微处理器由正时函数控制。如果您在第一次尝试中不成功匹配安全码,请等待1-2分钟,然后再尝试 - 此延迟允许微处理器重置其计时器电路 - 并尝试多两次或三次。

型号3020
智能照明 - 一个灯泡位于电动头的每一侧,以帮助照亮整个车库。灯光持续4分钟,一旦开启器被激活了足够的时间进入房屋。开启器具有(2)灯泡功能的明亮照明。Genie品牌的LED灯泡推荐。(如果使用白炽灯泡,则最大60瓦)。有关其他详细信息,请参见此页面的Genie LED灯泡。自动寻求双重频率 - 内部系统会自动使用遥控器或键盘生成的315或390 MHz频率,以帮助确保开瓶器响应,无论附近的潜在频率干扰,例如军事基础设备。预先编程的遥控器 - 准备在开箱即用的情况下使用简单的步骤,以更改编程,如果需要。homelink®&car2u®兼容 - 与当前和所有先前版本的Homelink®或Car2u®一起使用。不需要其他外部中继器套件或兼容桥。6'电源线(3020h型) - 用于高天花板应用。

模型课程
Terminal Outcomes: ● Use selected AI applications online to explore various types of AI ● Recognize AI applications in everyday life ● Identify the various types of problems that AI can solve ● Breakdown a human action into parts to identify learning requirements and processes involved ● Identify the various components of human learning ● Identify the use of data in various given activities and applications ● Recognize different types of data and explore how the same data can be represented in different ways ● Analyze and从表示数据,符号和图表中提取信息●调查数字系统如何表示二进制中的文本,图像和音频数据●解释代数,概率和统计信息在AI中的作用●解释在AI中进行数据可视化的需求●AI●解决问题的问题解决方案的解决方案●warge a I Seption beartion weartion beartion beart pocution beartion beartion beartion beard pocution beard pocution warry pocution beartion beartion warry pocution●培训现有的AII●培训AI II II●培训AI II●使用Python语言

模型课程
•描述各个行业中的AI和大数据分析的用例,并定义此职业下的各种角色•描述产品工程概念,例如将需求转化为产品并确保其及时交付。•定义用于分析的基本统计概念,例如均值,中位数或模式等中心趋势的度量,或统计异常(如缺失值,偏见或异常值)。•使用开发工具,框架,平台,库和软件包来开发软件代码。•评估模型的运行时间和内存消耗,并对其进行修改以适合系统的速度和内存约束。•开发可以根据系统的要求和约束来支持算法模型的部署的软件代码。•根据工作的性质计划项目时间表和时间表。•展示与同事的有效沟通和合作。•采取措施维持工作场所的健康和安全标准。•使用不同的方法有效地管理和共享数据和信息•通过有效的沟通和冲突管理在工作场所建立牢固的关系。•确定维持包容性的,环境可持续的工作场所的最佳实践

会员模型和仓库模型在
虽然已经有大量研究对好市多独特的商业策略和模式进行了研究,但很少有研究者深入研究好市多的顾客。作为北美最著名的零售商之一,好市多的使命是“持续以尽可能低的价格向会员提供优质的商品和服务(Costco.com)”。这句话反映了好市多保持尽可能低的会员价格的本质竞争力。好市多选择了一种新颖的商业模式来实现低价并从会员费中获利,而不是将商品定价过高。同时,他们的仓储模式降低了劳动力成本,增加了单品的供应量。好市多创造了一种将会员制和批量销售相结合的新商业模式,降低了产品价格并吸引了更多的顾客。随着经济的不断发展,特别是在北美,各种新颖的商业模式被使用;然而,它们的基本工作原理很少被强调。本文旨在找出仓储和会员制在吸引更多客户和使公司受益方面发挥了什么作用。本研究调查了30名居住在多伦多并拥有好市多门店的受访者,以了解会员对这两种商业模式的态度。该研究还采用了定量方法,使用了 Costco 网站、年度报告和各种金融网站等二手数据来源。结果表明,Costco 通过将自己定位为付费会员和仓储模式,通过该定位中隐含的隐形广告吸引了大量关注。关键词:Costco 营销策略、会员、仓储、广告