XiaoMi-AI文件搜索系统
World File Search SystemObjec

全职工作的工作objec ves ...
1。引入工作(WA)是一个经验丰富的学习机会,可以通过与新加坡或海外的主人组织(HO)的监督工作安置来增强其就业准备和就业能力。鼓励学生接受与他们的学习学科或替代途径相关的机会,以获得宝贵的现实生活经验并增强其跨学科技能和能力。SUSS学生可以参考CEL门户中的WA指南。学生可以分配Mulɵ学科任务和跨文章项目。在适当的情况下,学生可以寻求CDO负责人的批准,以合理地离开其批准的工作。2。供应链管理供应链管理(SCM)的职业对业务成功和新加坡的经济至关重要。scm是指从原产地到Consumpɵon的计划,采购,生产,生产和服务的计划,采购,生产,生产和分配。鼓励学生从以下框架中进行基于其基于程序的SCM知识和技能的工作任务:
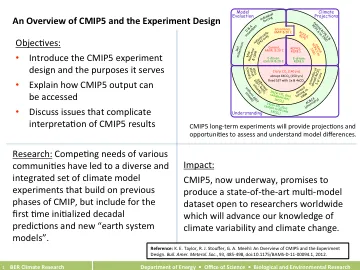
CMIP5和实验设计OBJEC的概述(VES
研究:compe(各种社区的需求(ES导致了基于CMIP先前阶段的多样化和集成的气候模型实验集,但包括第一阶段(Me Ini(Me Inizized DeCadal Predic(ONS和新的“地球系统模型”)。

工程高度 - 绳索课程设计objec = ve
课程计划3:工程高度 - 绳索课程设计OBJEC = VE:了解工程原理,设计和TES4NG。dura = ON:2小时材料:•微型绳索课程模型(或图像)•诸如绳索,块和连接器之类的建筑材料(用于设计AC4VITY)•安全手册或指南•笔记本和铅笔引入(15分钟):1。讨论什么是工程及其在日常生活中的相关性。2。介绍绳索课程设计的概念,强调安全性和力量。ac = vity(1小时):1。绳索课程Explora4on:o学生穿越实际的绳索课程。o他们观察并记录了所使用的材料,设计元素和任何安全功能。2。设计原则:o讨论课程的某些SEC4ON如何挑战身体的不同部分。o讨论平衡,重量分布4ON和材料强度在设计中的作用。讨论(20分钟):1。分享有关绳索课程的设计的observa4ons。2。更深入地了解为什么选择特定材料以及如何测试强度。applica4on(20分钟):1。设计一个迷你绳索课程:o小组,学生使用建筑材料来创建简单的绳索课程设计。o他们应该考虑体重分配4ON,安全性和用户体验。结论(15分钟):1。查看课程中探讨的工程原理。2。讨论工程学中的Poten4Al职业以及这些原则如何适用于现实世界。
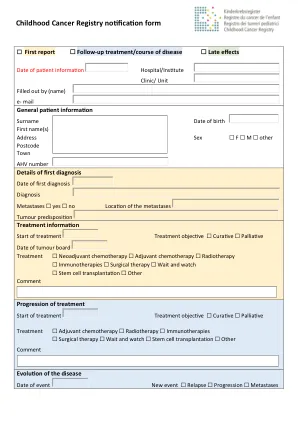
儿童癌症注册表没有表格
《癌症注册法》(KRG)及其条例(KRV)于2020年1月1日生效。诊断诊断的医生负责提供有关癌症注册/objecɵon权利的信息,缺少的空间负责提供有关癌症注册/objecɵon权利的信息(CRR,Art。,Art。13)。遵守这些法律记录的责任和提供信息的责任是艺术意义的专业义务。《医学界法》第40条(MEDBG; SR 811.11)。《医学界法》第40条(MEDBG; SR 811.11)。

第十届非洲裂谷地热会(Argeo
为了加快非洲的地热发展,东非地区已经制定了各种创新地热支持计划。UNEP -Argeo计划是该地区主要的Objecɵve地区的先驱之一,是催化该地区地热发展的投资。该计划通过其项目组件之一,支持各国主持和组织坐标双年展的地热区会议与其他地热支持计划和合作伙伴。这两年一次的会议的目的是促进区域合作社,在该地区的地热资源的资源,开发,投资和Uɵlizaɵon上创建一个信息交流。tgdc是坦桑尼亚地热发展所强制的国家。

独立前印度经济的主要特征
在 1947 年印度独立之前,英国统治了印度两个世纪。英国经济政策的主要目标是将印度变成英国现代工业基础扩张的供给经济。独立前,印度经济强劲,主要以农业和手工业为主。纺织品和宝石等田间手工艺品的卓越品质为印度产品赢得了全球市场。

crada 指南.pdf
根据 1980 年《史蒂文森-怀德勒技术创新法》(经 1986 年《联邦技术转让法》修订)的规定,CRADA 允许联邦政府和非联邦合作伙伴优化资源、在受保护的环境中共享技术专长、共享努力中产生的知识产权并加速联邦开发技术的商业化。研究目标虽然对适合 CRADA 的研究主题没有限制,但所有 CRADA 研究项目都必须高度集中和细分,并且必须仔细评估每个提议的 CRADA 的整体研究目标。在考虑拟议的 CRADA 时,双方应确定拟议合作的目标是否值得建立 CRADA,或者其目标是否更适合通过采购合同、材料转让协议、合作协议或其他合同机制来实现。拟议合作者的科学和商业能力也将受到评估。能源部 (DOE) 战略伙伴关系项目通常旨在支持与 DOE 的使命和战略目标相一致的第三方研究工作。这些项目旨在应对能源、环境和国家安全方面的各种挑战。适合 DOE CRADA 项目的具体研究项目类型可能有所不同,但以下是一些示例:
Error 500 (Server Error)!!1500.That’s an error.There was an error. Please try again later.That’s all we know.
最大化对国家癌症战略Mulroe女士的贡献强调了战略目标,最关键的是最大化对国家癌症战略的贡献。成立于2017年,该策略旨在让6%的癌症患者在临床试验中,这一目标尚未实现。第二个战略目标表明了爱尔兰癌症试验社区,中央办公室的员工和现场人员的势力。第三种战略OBJEC TIVE是为政府,利益相关者,HSE和卫生部提供社区的倡导,强调了临床研究的重要性及其在为患者提供高标准临床护理方面的重要作用。全岛癌症试验命题正在形成,并且在过去几年中取得了重大进展,尤其是在做过斯特林工作的AICRI中。

A-CAM网络安全MEM
•在2024年1月1日之前实施OperaɵOnal网络安全和供应链风险管理计划。•在2024年1月2日之前,或根据《降低文书工作》(Readucthe)法案(以较晚的为准),在2024年1月2日或在批准后30天内提交了USAC(通用服务管理公司)和CERɵFY的合规性。•与珠子程序一致,网络安全风险管理计划必须反映NIST网络安全框架的最新版本,并且必须反映一组已建立的网络安全最佳PRACCIS,例如CISA的跨部门跨部门绩效目标和Objecɵves或Internet Internet SecurityCriɵcal安全控制中心。•也与珠子计划一致,供应链风险管理计划必须纳入NISTIR 8276中讨论的关键实践,网络供应链风险管理中的关键praccces:工业的观察以及来自NIST SP 800-161R1的相关供应链风险管理指南。