XiaoMi-AI文件搜索系统
World File Search SystemPick

CET 单一产品说明书 - iPSC 重编程试剂盒
细胞 CR1008-500 人类阿尔茨海默氏症早老素-1 突变 iPSC 细胞 CR1009-500 人类戈谢氏病 1 型 iPSC 疾病 细胞 CR1010-500 人类囊性纤维化 iPSC 模型 细胞 CR1011-500 人类胱氨酸病 iPSC iPSC 细胞 CR1012-500 人类尼曼匹克 C 型 (雄性) iPSC 细胞 CR1013-500 人类尼曼匹克 C 型 (雌性) iPSC 细胞 CR1014-500 人类 Alpha 1 抗胰蛋白酶缺乏症 iPSC


疾病改良,N-乙酰基-L- ...
Disease-Modifying, Neuroprotective Effect of N-acetyl-L-leucine in Adult and Pediatric Patients with Niemann–Pick disease type C Authors: Marc Patterson, Uma Ramaswami, Aimee Donald, Tomas Foltan, Matthias Gautschi, Andreas Hahn, Simon Jones, Miriam Kolnikova, Laila Arash-Kaps, Julien Park, Stella Reichmannová,Mark Walterfarng,Pierre Wibawa,Marianne Rohrbach,Kyriakos Martakis,Tatiana Bremova-ertl隶属关系:神经学,儿科和临床基因组学部门瑞士(T. Bremova-ertl,医学博士,M。Gautschi,MD)溶酶体存储障碍单元,皇家免费伦敦NHS基金会信托基金会(U. Ramaswami,MD)儿童神经病学系,美国国家儿童疾病,Bratislava,Bratislava,Bratislava,Bratislava,for Move Commenius compory of National Institute of Children Institute医学博士Kolnikova)
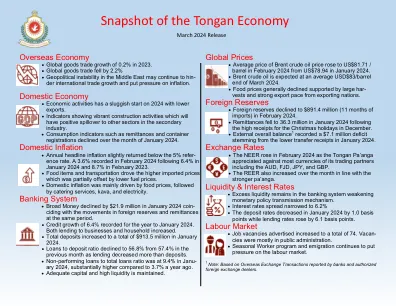
Snapshot of the Tongan Economy
In its February 2024 Global Monthly report, the World Bank Group stated that global trade was relatively low at an estimated growth of 0.2% in 2023. Specifically, global goods trade fell by 2.2% in 2023. This is reflective of the slowdown in the global growth of industrial production specifically in advanced economies along with the slowdown in emerging markets and developing economies. This is a consequent of the fading pandemic era disruptions and supply chain pressures. Notably, this marks the first annual decline outside of a global recession in the past 20 years. Conversely, services trade recorded an improvement in 2023 specifically in the first half buoyed by robust demand for travel and international tourism activities. Overall, global trade is projected to pick up by 2.3% in 2024 and further expansion by 3.1% in 2025, supported by global growth output and normalization in trade patterns.

机器人组的设计,分析和实施
摘要:今天,技术正在沿着同一方向发展,以迅速增加的人类需求。为满足这些需求所做的工作使生活每天更轻松。机器人武器与外部用户或执行预定的命令一起工作。如今,每个领域的机器人武器领域最发达的领域是行业和医学领域。该项目的主要重点是设计和开发机器人臂的机制,以供采摘和位置。机器人臂的设计具有5度的自由度,并编程为准确地完成简单的轻型材料挑选,并放置任务以协助任何行业的生产线。3D打印方法用于制造项目的机器人臂组件。因此,它在此方法中提供了更精确的维度以及巨大的时间和节省成本。机器人臂配备了6台伺服电动机,可连接零件并带动臂移动。arduino,一种开源计算机硬件和软件可通过驾驶伺服电动机来修改位置来控制机器人臂。无线控制是通过通过蓝牙模块与Android操作系统一起使用智能手机来完成的。机器人臂正在测试和验证其性能,结果表明它可以正确执行选拔任务。为了建立一个良好的仿真环境,我们使用Fusion 360软件。关键字:机器人臂,轴心,自由度,工作信封和工作量,空间,运动学,有效载荷,拾取和位置机器人,机器人臂,机器人 - 阿杜诺。



发电/大容量存储服务
发电机桥接:储能系统 (ESS) 在发电机停止时接通发电机负载的能力,直到新发电机启动或同一台发电机重新启动。通过在低负载时刻充电,ESS 还可以避免停止设备(以及相关的启动成本)。发电机爬升:ESS 能够接通强烈而快速的负载变化,为给定发电机提供足够的时间,根据最佳技术建议提高或降低其生产水平,以满足相关的负载变化。