机构名称:
¥ 1.0
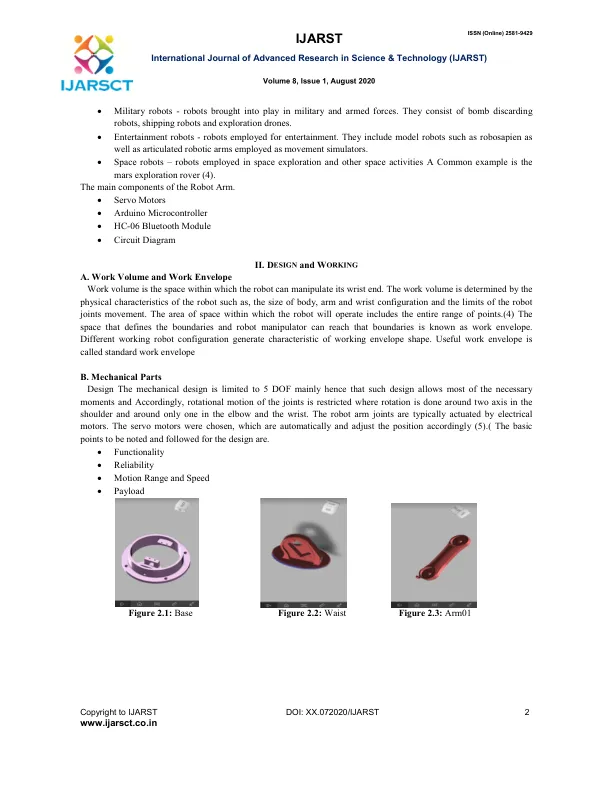
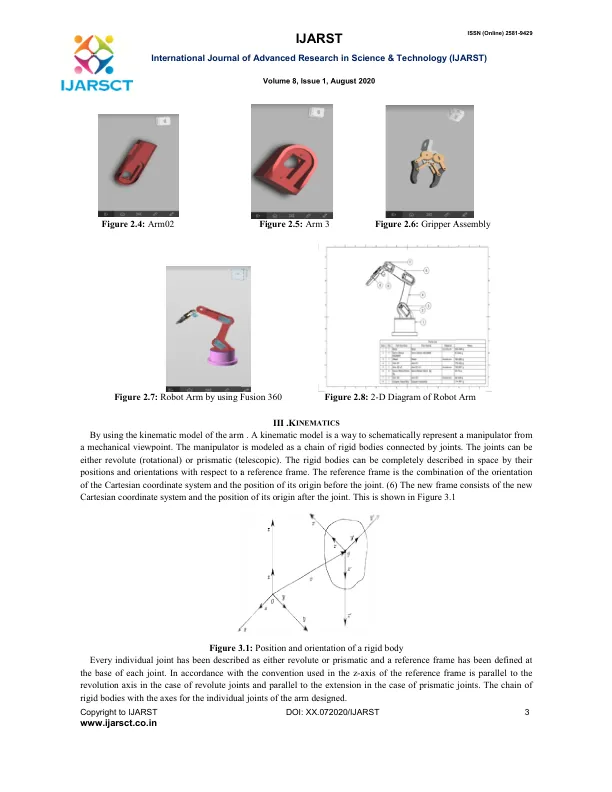
摘要:今天,技术正在沿着同一方向发展,以迅速增加的人类需求。为满足这些需求所做的工作使生活每天更轻松。机器人武器与外部用户或执行预定的命令一起工作。如今,每个领域的机器人武器领域最发达的领域是行业和医学领域。该项目的主要重点是设计和开发机器人臂的机制,以供采摘和位置。机器人臂的设计具有5度的自由度,并编程为准确地完成简单的轻型材料挑选,并放置任务以协助任何行业的生产线。3D打印方法用于制造项目的机器人臂组件。因此,它在此方法中提供了更精确的维度以及巨大的时间和节省成本。机器人臂配备了6台伺服电动机,可连接零件并带动臂移动。arduino,一种开源计算机硬件和软件可通过驾驶伺服电动机来修改位置来控制机器人臂。无线控制是通过通过蓝牙模块与Android操作系统一起使用智能手机来完成的。机器人臂正在测试和验证其性能,结果表明它可以正确执行选拔任务。为了建立一个良好的仿真环境,我们使用Fusion 360软件。关键字:机器人臂,轴心,自由度,工作信封和工作量,空间,运动学,有效载荷,拾取和位置机器人,机器人臂,机器人 - 阿杜诺。
机器人组的设计,分析和实施
主要关键词


相关文件推荐