XiaoMi-AI文件搜索系统
World File Search SystemPlane
Ultra Filter 700
Shorts, opens, minimum line/space violations, nicks, protrusions, dish downs, copper splashes, pinholes, missing or excess features, wrong size and position of features, clearance and split plane violations, blocked holes, annular ring violations, SMT violations, black spots, wire bonding pad defects, flip chip pad defects, laser via defects as missing drill, over drill, under drill, via shift, residue在Via中,通过大小和形状
独立 – 我的第一个项目第 1 页
这些字段类型的共同点是您必须定义平面倾斜度和方位角。一般来说,平面倾斜度定义为收集器平面与水平面之间的角度。平面方位角是收集器平面与朝向赤道的方向之间的角度。在北半球,这意味着方位角从正南(朝向赤道)测量,向西(逆时针)为正值:南 = 0°,西 = 90°,北 = 180°,东 = -90°。在南半球,方位角从正北(朝向赤道)测量,向东(顺时针)为负值:北 = 0°,西 = 90°,南 = 180°,东 = -90°。
电子技术与工程学士学位 (B.TECH. ELECTRONICS & ...) 课程安排与教学大纲
简单正交投影、第一角和第三角、不同象限的点和线的投影、轨迹、倾角、线的真实长度、辅助平面上的投影、最短距离、相交线和非相交线。除参考平面之外的平面——垂直和斜平面、轨迹、倾角等,平面内线的投影,斜平面到辅助平面的转换以及相关的演示问题。不同形状的平面图形的不同情况,与一个或两个参考平面成不同的角度,以及平面图形中的线成不同的给定角度,通过投影获得平面图形的真实形状。立体投影,放置在不同位置的立体的简单情况,轴面和线位于立体的面上成给定角度,曲面的发展——简单物体的发展,如四面体、立方体、八面体、方形金字塔和五角棱柱,等轴测投影简介。
电网连接系统 – 用户手册
这些字段类型的共同点是您必须定义平面倾斜度和方位角。一般来说,平面倾斜度定义为收集器平面与水平面之间的角度。平面方位角是收集器平面与朝向赤道的方向之间的角度。在北半球,这意味着方位角从正南(朝向赤道)测量,向西(逆时针)为正值:南 = 0°,西 = 90°,北 = 180°,东 = -90°。在南半球,方位角从正北(朝向赤道)测量,向东(顺时针)为负值:北 = 0°,西 = 90°,南 = 180°,东 = -90°。
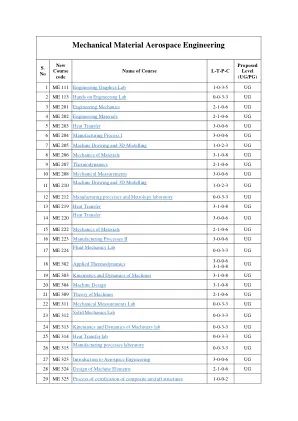
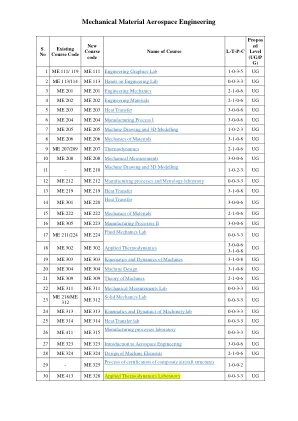
机械材料航空航天工程
模块 5:虚功和能量法- 虚位移、质点虚功原理和理想刚体系统、自由度。主动力图、有摩擦系统、机械效率。保守力和势能(弹性和重力)、平衡能量方程。能量法在平衡中的应用。平衡稳定性。模块 6:粒子动力学- 粒子运动学:直线运动、平面曲线运动 - 直角坐标、法向和切向坐标、极坐标、空间曲线 - 圆柱、球面(坐标)、相对运动和约束运动。粒子动力学:力、质量和加速度 - 直线和曲线运动、功和能量、冲量和动量 - 线性和角向;冲击 - 直接和斜向。粒子系统动力学:广义牛顿第二定律、功、冲量、能量和动量守恒定律 模块 7:刚体动力学简介 平面刚体运动学:刚体绕固定轴旋转的方程、一般平面运动、平面运动中的瞬时旋转中心、粒子相对于旋转框架的平面运动。科里奥利加速度平面刚体动力学:刚体运动方程、平面运动中刚体的角动量、刚体的平面运动和达朗贝尔原理、刚体系统、受限平面运动;作用于刚体上的力的能量和功、平面运动中刚体的动能、刚体系统、能量守恒、刚体的平面运动 - 冲量和动量、刚体系统、角动量守恒。
机械材料航空工程
模块5:虚拟工作和能量方法 - 虚拟位移,粒子的虚拟工作原理以及刚体的理想系统,自由度。主动力图,有摩擦的系统,机械效率。保守力和势能(弹性和重力),平衡的能量方程。能量法对平衡的应用。平衡的稳定性。模块6:颗粒动力学 - 颗粒的运动学:直线运动,平面曲线运动 - 矩形坐标,正常和切向坐标,极性坐标,空间曲率 - 圆柱 - 圆柱形,球形(球形(坐标),相对和约束运动。颗粒动力学:力,质量和加速度 - 直线和曲线运动,工作和能量,脉冲和动量 - 线性和角度;影响 - 直接和倾斜。颗粒系统动力学:牛顿的第二定律,工作能源,脉冲弹药,能量的保护,能量和动量模块7:刚体的刚性身体动力学介绍:刚体旋转的方程式,用于在固定轴上旋转固定轴旋转固定轴的固定平面,一般平面运动,旋转平面运动的旋转旋转的旋转旋转的旋转架子旋转的旋转旋转旋转的旋转。coriolis刚体刚体的加速动力学:刚体的运动方程,平面运动中刚体的角动量,刚体的平面运动和D'Alembert的原理,刚体的系统,刚体的系统,限制了平面运动;作用在刚体上的力和作用,平面运动中刚体的动能,刚体的系统,能量保护,刚体的平面运动 - 脉冲和动量,刚体的系统,刚体的系统,保护角动量。



补充材料:分层的水生微环境控制由活性地毯产生的波动
图4和图5显示了厚度H = 16和λ= 0的浮膜的涡度场和循环结果。25我们观察到涡度场沿垂直于观测平面的方向更强(请参阅3)。图4,我们在x -z平面中显示了涡流流和循环模式的“前”视图,我们期望ωy中的涡度大于其他平面。图5,我们在y -z平面中显示了同一情况的涡度场,这就是φ=π/ 2的情况,在那里我们观察到涡度ωx and涡流和该平面上的循环大于其他组件。
续第一部分 - 印度知识产权
(57) 摘要:本公开涉及通用文件虚拟化 (UFV),其功能类似于单个虚拟数据中心,跨越各种数据孤岛的内部存储、存储在 IaaS、PaaS 和 SaaS 中的数据中心云数据资源、远程办公室和分支机构以及混合云,主要提供结合网络弹性技术、信息安全、文件存储和对象存储技术的二级数据存储。本发明建立在分解的控制平面、安全平面和分散的数据平面架构之上。系统控制器、安全控制器和通用文件系统模块对通过它的数据实施各种文件虚拟化、安全或数据服务算法。所有技术都应用于各种内部数据库、云提供商、存储站点和云服务。本公开内容还引入了称为 UFV 的新概念,实现了一种安全的 UFS,涵盖了公司分布在各个地域和云服务中的所有不同数据源,具有集中控制平面、安全平面和由数据控制器控制的安全保险库构建的分散数据平面。图 7