XiaoMi-AI文件搜索系统
World File Search SystemPose

氟化的卡托普利类似物抑制金属β-乳糖酶,并促进NDM-1结合姿势的结构测定
对大多数临床使用的β -lactam抗生素的细菌耐药性是一种全球健康威胁,并且,依次将金属β-乳糖酶(MBL)抑制剂的发展驱动力。新MBLS的快速发展需要新的策略和抑制剂开发工具。在这项研究中,我们设计并开发了一系列三氟甲基化的Capteropril类似物作为酶抑制剂结合的结构研究的探针。新化合物的活性与针对新德里的非氟化抑制剂相当。最活跃的化合物是D-Captopril的衍生物,表现出0.3μM的IC 50值M。几种化合物表现出协同作用,恢复了MeropeNem的效果,并降低了NDM-1中的最小抑制浓度(MIC)值(MIC)值(MIC)(MIC)(最高64倍),vim-2(最高为8基)和IMPCHRI和8-FORSERIIA(至8-FORCHIA)(至8-FORCERIA)(至8-foldice),至8倍。NMR光谱和分子对接确定了NDM-1中的结合姿势,表明抑制剂的氟化类似物是MBL抑制剂复合物结构研究的有价值工具。

在英特尔 Myriad X 嵌入式 SoC 上加速人工智能和计算机视觉以进行卫星姿态估计
在边缘部署人工智能 (AI) 和计算机视觉 (CV) 算法的挑战性推动了嵌入式计算社区研究异构片上系统 (SoC)。这种新型计算平台提供了接口、处理器和存储的多样性,然而,AI/CV 工作负载的有效分区和映射仍然是一个悬而未决的问题。在此背景下,本文在英特尔的 Movidius Myriad X 上开发了一个混合 AI/CV 系统,这是一个异构视觉处理单元 (VPU),用于初始化和跟踪卫星在太空任务中的姿态。航天工业是研究替代计算平台以遵守机载数据处理的严格限制的社区之一,同时也在努力采用 AI 领域的功能。在算法层面,我们依靠基于 ResNet-50 的 UrsoNet 网络以及自定义经典 CV 管道。为了实现高效加速,我们结合多种并行化和低级优化技术,利用 SoC 的神经计算引擎和 16 个矢量处理器。所提出的单芯片、稳健估计和实时解决方案在 2W 的有限功率范围内为 100 万像素 RGB 图像提供高达 5 FPS 的吞吐量。

lidpose:稀疏激光点云中实时3D人姿势估计,具有非重复循环扫描模式
摘要:在本文中,我们提出了一种基于新型的,视觉转化器的端到端姿势估计方法,Lidpose,用于实时人类骨架估计,在非重复循环扫描(NRCS)LIDAR点云中。在vitpose架构上建造,我们介绍了新颖的改编,以解决NRCS激光雷达的独特特性,即稀疏性和异常的类似Rosetta的扫描模式。所提出的方法解决了基于NRCS激光雷达的感知的常见问题,即测量的稀疏性,它需要在记录数据的空间和时间分辨率之间保持平衡,以有效地分析各种现象。lidpose利用NRCS激光雷达传感器的前景和背景细分技术来选择感兴趣的区域(ROI),使下痛成为移动行人检测和从RAW NRCS LIDAR LIDAR LIDAR测量序列中移动的端到端方法,该方法由静态传感器捕获的静态传感器供Sureveellance Seasarions捕获。为了评估该方法,我们创建了一个新颖的,真实的,多模式的数据集,其中包含来自Livox Avia传感器的相机图像和LIDAR点云,并带有注释的2D和3D人体骨架地面真相。

在帕金森氏病患者中使用人姿势估计的暂时空间和运动学步态参数的评估:近额外和侧视图之间的比较
步态障碍是帕金森氏病(PD)患者最常见的症状之一,与临床不良结局密切相关。最近,基于视频的人类姿势估计(HPE)技术吸引了与基于标记基于标记的3D运动捕获系统更便宜,更简单的方法进行步态分析的方法。然而,尚不清楚基于视频的HPE是否是测量PD患者的临时和运动步态参数的可行方法,以及该功能如何随相机位置而变化。在这项研究中,使用运动捕获系统和两个智能手机摄像机测量了24例早期PD患者的跑步机和地面步行,并放置在受试者的近额和外侧侧面。我们比较了从3D运动捕获系统和无标记的HPE获得的关节位置数据之间的暂时步态参数和运动学特征的差异。我们的结果证实了使用HPE的PD患者的Ana-lyzing步态的可行性。尽管脚后跟和脚趾清晰可见的近额外视图对于估计时间步态参数有效,但横向视图特别适合评估空间步态参数和关节角度。,在侧面记录不可行的临床环境中,近额外的视图记录仍然可以作为运动捕获系统的实际替代方法。
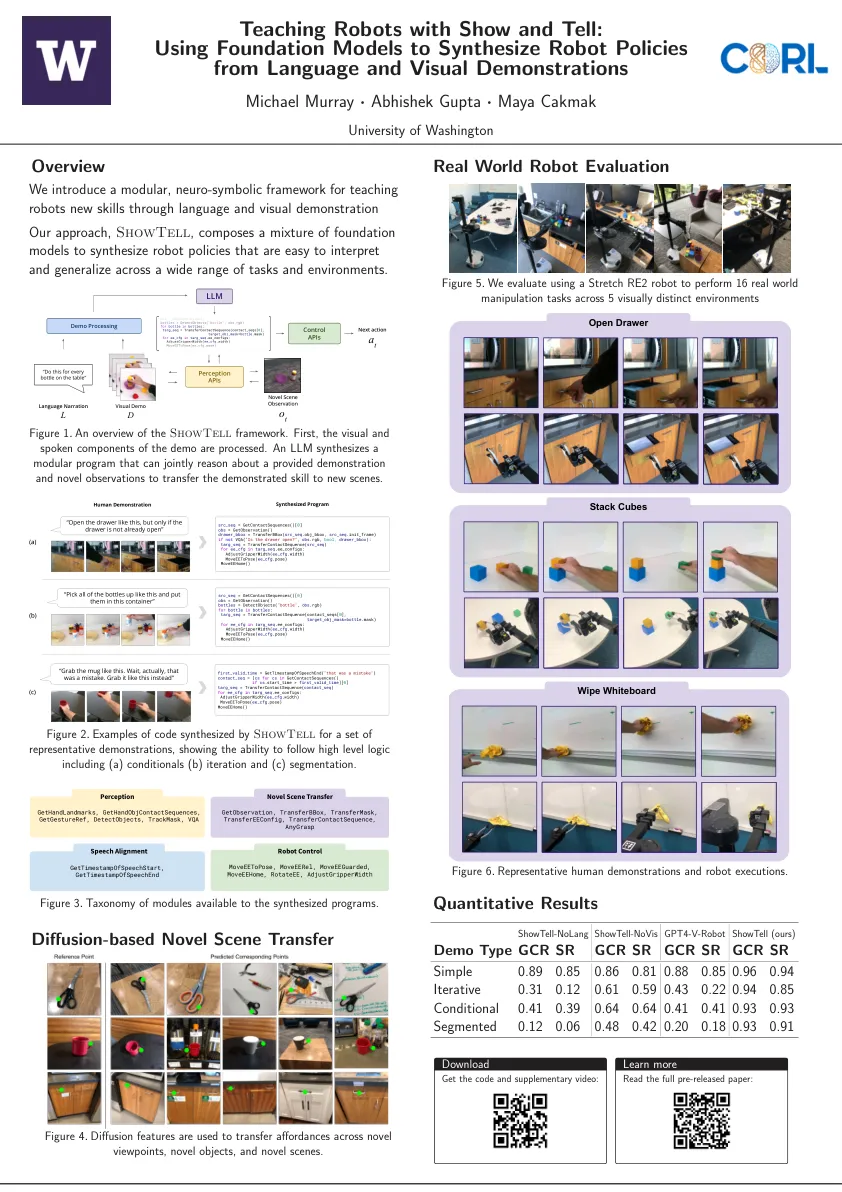
与Show and Tell一起教机器人-Michael Murray
src_seq = getContactquences()[0] obs = getObbox = trassebbox(src_seq .obj_bbox,src_seq .init_frame)如果不是vqa(“ draweer open吗?,obs .rgb,boool,draweer_bbox):targ_seq = TranscerContactSequence(src_seq)for targ_seq .eeq .eeq .eeq .eeq .eeq .eeq .eeq .eq.configs:adpadGripperWidth(ee_cfg .width)moveToopse(ee_cfg.width)moveToopse(ee_cfg .pose .pose)Moveeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeeehome()

新加坡的新经济地理
认可:(名称,机构,电子邮件)Ali Arniio,北卡罗来纳大学格林斯伯勒大学,anarnio@uncg.edu Olivier Absil,Li`Eege大学,Oliiege。 n.anugu@exexer.ac.ac.uk elyn baines, naval research lab, elyn.baines@nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.nrl.navy.Grenoble Alpes,Ipag,Jean-Philippe.berger@univ-grenoble-alpes.fr L. Ilsedore Cleeves,弗吉尼亚大学,lic3f@virginia.edu daniel daniel daniel dale,U.Wyoming飞行中心,William.C.Danchi@nasa.gov W.J.dev wit,eeso,eeso,wdewit@eso.org denis deNis deNis deNis defr`,li` eege,ddefefefre@uliege.be swn domagal-goldman,nasa-gsfc,smithsonian,cfa Harvard&Smithsonian,melvis@cfa.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.edu dirk dirk dirk dirk dirk Froebrich,肯特大学,df@star.kent.ac.ac.uk Mario Gai,Istuto Nazionole di Astrofisca,Mario.it posit Pose pose pose Gandhi,Poshak.gandhi and poshak.gandhi@sonon.ac.ac.uk paulo paulo gaulo gaulo gaulo gaulo gaulo gaulo gaulo gaulo gaulo garcia Porto,葡萄牙,pgarcia@fe.up.pt Tyler Gardner,密歇根大学,tgardne@ummich.edu douglas gies,佐治亚州立大学,gees@chara.gsu。 Jean-francois.gonzalez@ens-lyon.fr Brian Gunter,乔治亚理工学院,brian.gunter@aerospace.edu sebastian hoenig,英国南安普敦大学,s.hoenig@song@sonn.ac。澳大利亚国立大学,Michael.ireland.ireland@anu.au Anders Jorgensen,新墨西哥矿业与技术研究所,Anders.m.Jorgensen@nmt.edu Makoto Kishimoto,京都Sangyo Sangyo大学,日本,日本dev wit,eeso,eeso,wdewit@eso.org denis deNis deNis deNis defr`,li` eege,ddefefefre@uliege.be swn domagal-goldman,nasa-gsfc,smithsonian,cfa Harvard&Smithsonian,melvis@cfa.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.harvd.edu dirk dirk dirk dirk dirk Froebrich,肯特大学,df@star.kent.ac.ac.uk Mario Gai,Istuto Nazionole di Astrofisca,Mario.it posit Pose pose pose Gandhi,Poshak.gandhi and poshak.gandhi@sonon.ac.ac.uk paulo paulo gaulo gaulo gaulo gaulo gaulo gaulo gaulo gaulo gaulo garcia Porto,葡萄牙,pgarcia@fe.up.pt Tyler Gardner,密歇根大学,tgardne@ummich.edu douglas gies,佐治亚州立大学,gees@chara.gsu。 Jean-francois.gonzalez@ens-lyon.fr Brian Gunter,乔治亚理工学院,brian.gunter@aerospace.edu sebastian hoenig,英国南安普敦大学,s.hoenig@song@sonn.ac。澳大利亚国立大学,Michael.ireland.ireland@anu.au Anders Jorgensen,新墨西哥矿业与技术研究所,Anders.m.Jorgensen@nmt.edu Makoto Kishimoto,京都Sangyo Sangyo大学,日本,日本

初步1确定MON 88302 CANOLA(BRASSICA NAPUS)
回应了孟山都公司(以下称为孟山都)的请愿书11-188-01p,美国农业部(USDA)的动物和植物健康检查服务(Aphis)(APHIS)(USDA)已确定88302 CANOLA和OPENITY不太可能被视为pose pose pose soph soph soph soph soph soph soph soph soph soph soph soph soph soph soph soph,在《联邦法规守则》第7章中,第340部分(7 CFR第340部分)。由于Aphis确定了88302 Canola不太可能构成植物害虫风险,因此Aphis会批准对非管制状态的请愿书88302 CANOLA。因此,Aphis批准的许可证或已确认的通知,这些通知将不再需要这些法规下的环境释放,州际运动或进口,而Mon 88302 Canola及其后代则不再需要。在7 CFR第319部分的Aphis外国隔离通知和第7 CFR部分的《联邦种子法》条例中,仍将遵守Aphis外国隔离通知。

Xianyi Cheng
扩大机器人敏感性:在操纵任务环境中利用各种要素Robograds研讨会,佐治亚理工学院,由Sonia Chernova主持,布朗大学的智能机器人实验室,由乔治·科尼达里斯(George Konidaris)主持,由乔治·科尼达里斯(George Konidaris)举办,由乔治·科尼达里斯(George Konidaris)托管,2023年2023年,宾夕法尼亚大学佩尔·帕尔斯(Maniip Place),迈克尔·波西斯(Maniip Prospare),迈克尔·波斯(Pennsylvaniip),迈克尔·波斯特(Maniip pros),迈克尔·pose(Michael pose)。纽约大学运动实验室的机器,由Ludovic Righetti 2022 R-Pad Lab,Carnegie Mellon大学主持

postgresql / postgis到ROS2桥的空间数据< / div>
• Architecture allow easy extension to additional (non-standard) messages • Publish messages that contain all rows at once: • Derive from StampedTopicParser • E.g., PointCloud2 • Publish message row-by-row: • Derive from SingleElementParser • E.g., PointStamped , Pose

引用 (APA) Pasqualetto Cassinis, L., Fonod, R., Gill, E., Ahrns, I., & Gil Fernandez, J. (2020). 基于 CNN 的近距离姿势估计系统
本文介绍了一种新颖的框架,该框架将用于特征检测的卷积神经网络 (CNN) 与协变高效 Procrustes 视角 n 点 (CEPPnP) 求解器和扩展卡尔曼滤波器 (EKF) 相结合,以实现对非合作航天器周围近距离操作的稳健单目姿态估计。在役服务航天器对非活动航天器的相对姿态估计是当前和计划中的太空任务设计中的一项关键任务,因为它与近距离操作相关,例如在轨服务和主动碎片清除。这项工作的主要贡献在于通过将协方差矩阵与 CNN 为每个检测到的特征返回的热图相关联,从图像处理步骤中获取统计信息。此信息包含在 CEPPnP 中,以提高滤波器初始化期间姿态估计步骤的准确性。导出的测量协方差矩阵用于紧密耦合的 EKF,以便更好地表示特征检测步骤中的测量误差。这提高了滤波器在 CNN 检测不准确时的鲁棒性。在目标的光照条件和部分掩蔽条件下,所提出的方法能够返回相对姿态以及相对平移和旋转速度的可靠估计值。欧洲航天局 Envisat 航天器的合成 2D 图像用于生成数据集,用于训练、验证和测试 CNN。同样,这些图像用于重建代表性的近距离场景,以验证所提出的方法。