XiaoMi-AI文件搜索系统
World File Search SystemRadars

用于地面监视的战术雷达
''在战场战场监视的舞台上始于1967年,其计划开发了一个雷达系统,该系统将穿透丛林叶子并检测到移动的敌对入侵者。在越南战争期间发生了这项努力,当时呼吁国家实验室为战场战场监视提供解决方案,包括涉及地面和机载的传感器。地面传感器可以松散分为两类。特殊的地面雷达剂量用于检测矿山和其他炸药,以及隐藏的隧道和埋藏的商店。其他基于地面的雷达系统用于调查传感器视野内的大区域地形区域,以检测和识别固定的地面目标并检测,识别和跟踪移动的地面目标。为战术战场设计而设计的空气传感器需要及时地调查地面上的大面积,以检测和识别可能隐藏在地面混乱中或受对策保护的固定和移动的表面目标。林肯实验室已经开发了

LeoLabs 全球雷达网络
我们介绍了 LeoLabs 的全球相控阵雷达网络。LeoLabs 的网络由四个运行中的雷达站组成,两个超高频雷达站和两个 S 波段雷达站,还有一个正在建设中的 S 波段雷达站。我们展示了雷达网络性能的定量分析,包括网络和组件级性能指标。与独立数据集的比较证明了仪器的准确性和精确度,而雷达站之间的比较证明了 LeoLabs 测量的自洽性和 LeoLabs 轨道状态矢量估计的精确度。我们还展示了模拟网络在编目和跟踪以前未编目的驻留空间物体方面的性能。我们展示了除了跟踪 LEO 中的 RSO 之外,网络如何用于各种任务。我们提供了网络在发射和早期轨道阶段操作期间的性能特征。最后,我们表明 LeoLabs 的雷达能够探测地球静止轨道 (GEO) 上的物体。这证明相控阵雷达是跟踪地球静止轨道物体的可行技术。
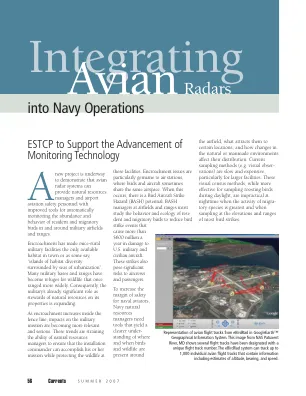
Sum07_将 Avian 雷达整合到海军行动中
2000 财政年度,美国国防部 (DoD) 遗产计划办公室为南卡罗来纳州克莱姆森大学雷达鸟类学实验室 (CUROL) 提供了资金,以开发一种能够探测机场鸟类的鸟类雷达系统,从而减少鸟击的发生。最初的 BirdRad 系统旨在成为一种廉价的移动式鸟类雷达。它包括一个低成本的商用海事雷达,配备 4 度波束宽度抛物面天线(以获得更好的高度分辨率)和一台台式个人计算机,用于在图形文件中显示和捕获雷达图像。CUROL 建造了五个 BirdRad 系统,部署在三个海军、一个海军陆战队和一个空军基地。虽然 BirdRad 在探测零到六海里范围内的鸟类方面非常有效,但它有几个局限性。主要是来自静止物体(“地面杂波”)的雷达回波会遮挡移动目标;从屏幕截图中提取目标轨迹太慢并且需要大量劳动力,无法追踪许多种类的鸟类;并且很难将屏幕上的目标与周围的景观联系起来。

现代雷达的性能评估 - DTIC
雷达建模的改进使设计人员能够将性能水平指定得非常接近理论极限。这导致了非常强大的系统,但在评估其性能时几乎没有实验不确定性的余地。然而,关于评估雷达性能的方法的已发表文献却出奇地少。测试新雷达通常有三个独立的阶段:i) 第一阶段是在实验室中测量参数,以确保雷达在“投入现场”时的表现与预期一致。ii) 第二阶段通常是供应商的验证试验,这可以确保了解雷达的行为,从而确保正式验收试验会成功。iii) 第三阶段是供应商和客户共同见证的验收试验,提供雷达符合其规格的合同证据。实验室测试和现场试验之间的关系在 [1] 中进一步讨论,使用适当的评估方案对现代雷达系统的重要性在 [2] 中进一步讨论。在本文中,我们将第三阶段称为“验收”试验,第二阶段称为“验证”试验,两者合称为“评估”试验。本文将重点介绍泰雷兹与客户合作在这些评估试验中使用的方法。本文描述的许多实验结果都是在评估期间获得的

使用毫米波雷达进行微米精度距离测量
本文介绍了使用高采样率和微米级精度的现代毫米波雷达进行距离测量的进展。对于导航中的雷达距离测量,高精度测量距离和高采样率测量精确距离非常重要,这样才能直接估算物体的加速度和速度。我们提出了一种场景,其中自动驾驶汽车完全依靠雷达距离传感器的测量来在 GNSS 降级环境中进行定位。根据给定的场景,列出了对雷达传感器的要求,并开发和构建了符合给定要求的原型雷达传感器。在实验室中验证了原型传感器的特性。将雷达传感器装置集成到自动驾驶汽车上,并在自动驾驶地面车辆上进行基本定位和物体检测测试。

改进主监视雷达的高度估计...
跟踪。由于 2-D 雷达提供的绘图数据仅包含距离和方位角信息,由于可观测性问题,无法使用单个传感器估计目标高度,因此需要结合从多个 2-D 雷达获得的信息(距离和方位角)。如果只有两个主雷达检测到飞机,则无法使用多点定位技术在空中交通管制系统中确定其高度。一次监视雷达 (PSR) 仅提供飞机的斜距和方位角测量,因此,空中交通管制 (ATC) 系统通常使用从飞机机载模式 C 应答器获得的高度信息来估计飞机的三维位置和速度。二次监视雷达 (SSR) 通常用于询问模式 C 和其他应答器并获取高度和其他
雷达和雷达数据的质量信息 - KNMI
EUMETNET OPERA 计划第二阶段(2004-2006 年)的工作计划包含一个工作包 1.2,即“雷达和雷达数据的质量信息”。四个不同的国家气象研究所组成的联盟致力于该项目,并解决了这个复杂的项目主题。此外,该项目的成果还获得了欧洲的广泛支持。水文和 NWP 建模社区对气象雷达的兴趣日益浓厚,已开始从以定性为主向定量为主的雷达数据使用转变。对于传统的临近预报用途,主要必须满足定性要求,但对于定量降水估计(QPE)或 NWP 模型中的同化,通常有严格的定量要求。在之前的 OPERA 计划中,项目成员负责“产品质量描述符定义”项目(Holleman 等人,2002 年)。该项目回顾了观测技术的物理问题,提出了解决技术固有局限性(如杂波和光束阴影)的方法,并定义了一组 BUFR 描述符来编码推荐的质量信息。该项目仅处理全局(静态)质量描述符,即对产品中的所有数据都有效的描述符。Daniel Michelson 和 Iwan Holleman 参与了 COST-717 中的数据质量项目,该项目涉及

CReSIS 机载雷达和冰雪平台...
本文提供了冰盖遥感中心 (CReSIS) 雷达和平台的更新和概述,包括这些系统的代表性结果。CReSIS 雷达系统的工作频率范围为 14 – 38 GHz。每个雷达系统的特定频带由所需的信号穿透深度、测量分辨率、分配的频谱和天线工作频率(通常受飞机集成的影响)决定。我们还重点介绍了最近的系统进步和未来工作,包括 (1) 增加系统带宽;(2) 小型化雷达硬件;(3) 提高灵敏度。对于平台开发,我们正在开发更小、更易于操作且更便宜的无人机系统。下一代平台将进一步扩大具有垂直起降能力的科学家的可及性。

监视雷达 多模式多任务雷达
PicoSAR 提供高分辨率合成孔径雷达 (SAR) 成像和地面移动目标指示 (GMTI) 功能,使新旧平台能够轻松获得真正的全天候地面测绘和监视能力。其体积小、重量轻、功耗低,即使在有效载荷有限的平台上也可以与电光/红外传感器并行安装。