机构名称:
¥ 1.0
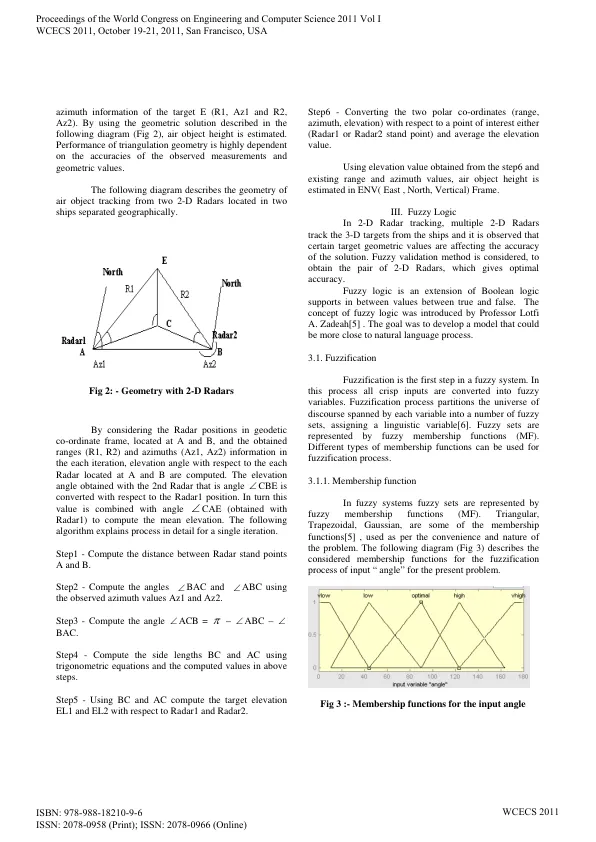
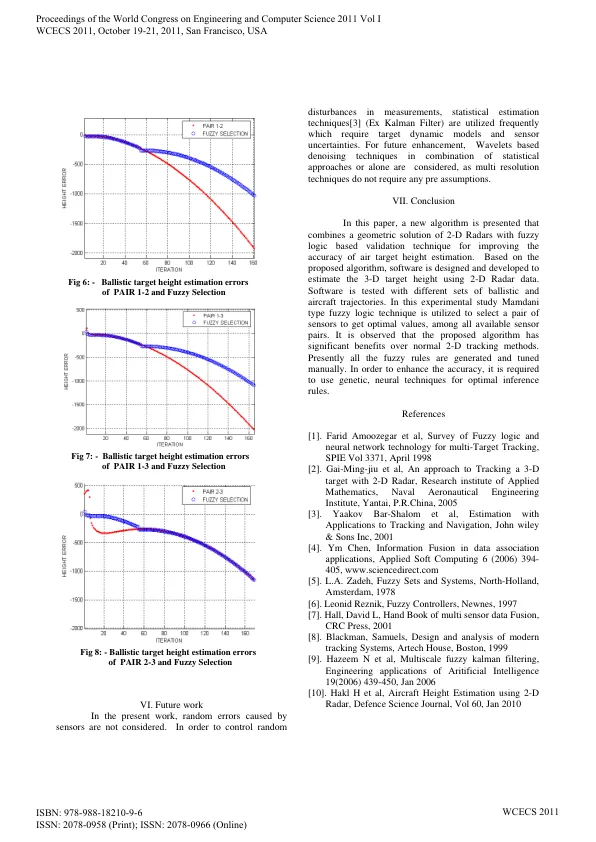
使用模糊逻辑的 2-D 雷达进行空中物体高度估计 SGK Murthy、MV Ramana Murthy、D Satya Narayana 摘要 - 多传感器跟踪是航空航天应用中广泛使用的技术,用于精确估计目标运动学。特别是海军跟踪系统在多传感器跟踪场景中利用不同类型的雷达(2-D、3-D)进行稳健估计。由于 2-D 雷达提供的信息仅包含距离和方位角值,因此很难使用 2-D 雷达估计空中物体的高度。为了克服这一限制,考虑采用几何方法来组合从位于两个不同位置的两个 2-D 雷达获得的信息。由于几何方法的解决方案取决于某些几何特征,因此不可能用一对传感器获得良好的结果。然而,为了获得更好的结果,提出了一种方法,并尝试使用两个以上的 2-D 雷达结合基于模糊逻辑的验证。本文讨论了与 2-D 雷达跟踪相关的问题,以及包括三角测量几何和基于模糊逻辑的验证方法在内的方法,以提高实时高度估计精度。索引术语:模糊决策、模糊逻辑、使用 2-D 雷达进行目标跟踪 I。简介雷达技术的发展始于 20 世纪初的第二次世界大战。所有部队都使用雷达来控制天空和海洋。那个时代开发的雷达技术仍然用于跟踪空中和陆地物体。目标跟踪是一个重要的研究领域,涵盖了国防和商业应用的广阔领域[1]。了解空中情况是空域控制的一项基本任务。多雷达跟踪 (MRT) 是海军目标跟踪应用中广泛使用的技术。在多传感器数据融合系统中,从位于不同位置的多个雷达获得的信息被融合到手稿中 2010 年 5 月 20 日收到 SGK Murthy 在印度海得拉巴国防研究与发展实验室工作,电话:91-40-24151654,电子邮件:sgk_murthy@yahoo.com MV Ramana Murthy 在印度海得拉巴奥斯马尼亚大学数学系工作,电子邮件:mv_rm50@gmail.com D Satya Narayana 在印度海得拉巴奥斯马尼亚大学数学系工作
使用模糊逻辑通过二维雷达估计空中物体高度
主要关键词



相关文件推荐