XiaoMi-AI文件搜索系统
World File Search SystemRadiance

光辉再生私人有限公司
a) 为可再生能源提供具体规定,鼓励可再生能源参与提供辅助服务。b) 鼓励各州制定自己的辅助法规,以促进连接到“州内”输电网络的发电机参与。c) 应允许开放接入的可再生能源在现行法规模式下提供辅助服务。d) 要求澄清在电池储能加可再生能源系统中,电池系统的规模是否需要至少达到 1 兆瓦。e) 对于即将推出的包括电池在内的能源存储技术,要求放宽 1 兆瓦的最低容量标准,就像加州等发达电力市场的情况一样,加州对存储资源做出了例外规定,最低参与容量已设定为 100 千瓦。这将鼓励建立这样的存储系统,并通过响应时间短的辅助服务使系统运营商受益。

计算机视觉中的神经辐射场
神经场景表示和渲染(NSR):基于NERF的基本原理,神经场景表示和渲染方法(NSR)方法迈出了进一步的步骤,以完善3D场景的刻画。NSR引入了创新的概念,例如层次表示和神经渲染,从而促进了复杂的场景创建并优化渲染效率。多视神经表面重建:专注于三维空间中对象表面的恢复,多视神经表面重建技术利用了单个对象的多个视图。通过利用神经网络的功能,它了解了图像及其相应的三维表面之间的复杂相互作用。这促进了重建中精度和细节的实现。

白天无云天空辐射度量化...
白天的光谱天空辐射度或天空亮度非常复杂,难以准确预测。激光环境效应定义和参考 (LEEDR) 第一性原理大气模型通过模拟辐射光穿过代表性大气层的散射、吸收和透射,将太阳的光谱辐射度传播到传感器。对于此应用,LEEDR 用于摄取数值天气预报 (NWP) 模型,并缩放边界层并将气溶胶负荷与地面测量结合起来。本研究将 LEEDR 得出的光谱天空辐射度模拟(包括测量的气候学、测量的气象学和气溶胶负荷数据)与直接天空辐射度测量进行了比较。白天天空的直接测量是使用 1 米口径望远镜和同时进行的 I 波段和 J 波段相机观测(分别为;0.8 和;1.2 毫米)完成的。将 LEEDR 白天天空模型与多个方位角、仰角和观测时间的 I 波段和 J 波段辐射率进行比较。残差分析用于确定模型的准确性,包括数值天气预报数据、历史气候学、通过现场粒子计数测量得到的缩放气溶胶负荷以及气象更新。关键发现促使将实时粒子计数测量纳入未来的白天天空辐射率模型,以通过真实的大气气溶胶负荷提高散射精度。
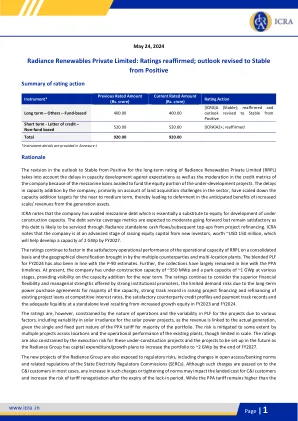
Radiance Renewables Private Limited:评级重申
评级继续考虑 RRPL 在综合基础上的运营能力的令人满意的运营表现以及多个交易对手和多地点工厂带来的地理多元化。2024 财年的混合 PLF 也与 P-90 估计值一致。此外,收款基本与 PPA 时间表保持一致。目前,该公司在建容量约为 350 MWp,园区容量约为 1 GWp,处于不同阶段,为近期的容量增加提供了可见性。评级继续考虑强大的机构推动者提供的卓越财务灵活性和管理优势、由于大多数容量的长期电力购买协议而导致的有限需求风险、在以有竞争力的利率筹集项目融资和再融资现有项目贷款方面的良好记录、令人满意的交易对手信用状况和付款记录以及由于 2023 财年和 2024 财年增长权益增加而导致的独立流动性充足。

紧凑型红外辐射光谱追踪器 (c-FIRST)
许多跨学科科学研究都需要对野火进行遥感,包括野火对生态的影响。几十年来,这项研究一直受到空间分辨率不足和探测器在短波和中波红外波长处饱和的阻碍,而高温 (>800 K) 表面的光谱辐射最为显著。为了解决这个问题,我们正在开发一种紧凑型高动态范围 (HDR) 多光谱成像仪。紧凑型火灾红外辐射光谱跟踪器 (c-FIRST) 利用数字焦平面阵列 (DFPA)。DFPA 由最先进的高工作温度屏障红外探测器 (HOT-BIRD) 和数字读出集成电路 (D-ROIC) 混合而成,具有像素内数字计数器以防止电流饱和,从而提供动态范围 (>100 dB)。因此,DFPA 将能够对温度变化范围从 300 K 到 >1600 K(燃烧的火灾)的目标进行非饱和高分辨率成像和定量检索。凭借从 500 公里的标称轨道高度解析地球表面 50 米级热特征的分辨率,一次观测即可捕获野火的全部温度和面积以及冷背景,从而增加每个返回字节的科学内容。使用非饱和 FPA 是一种新颖的做法,它克服了以前高辐射值使 FPA 像素饱和(从而降低了科学内容)的问题,并展示了遥感方面的突破性能力。因此,c-FIRST 适用于量化野火排放,这对于确定其对全球生态系统的影响至关重要。 c-FIRST 的 FPA 采用 InAs/InAsSb HOT-BIRD 外延材料制作,像素间距为 20 m,探测器阵列为 1280x480 格式,并与模拟 DROIC 混合。DFPA 的 50% 截止点为 ~4.5um,在 140K 工作温度下,整个 QE 光谱范围内测得的外部 QE~50%。我们将积分时间固定在 6 毫秒,以便在以 150 Hz 帧速率观察正常 300K 背景场景时在 MWIR 波段获得良好的灵敏度。对于标准模拟 ROIC,探测器像素在目标温度 ~700 K 时很容易饱和。当 D-ROIC 在 16 位模式下运行时,我们可以将饱和温度显著提高到 ~1100 K。当 D-ROIC 在超 HDR 32 位模式下(28 万亿电子阱深度)运行时,即使对于 1600 K 目标,探测器也不会接近饱和。火灾遥感的一个关键指标是可探测的最小目标尺寸。c-FIRST 可将可探测火灾的最小尺寸提高一个数量级,这主要是由于非饱和探测器的空间分辨率比 GOES 上的高级基线成像仪等当前维修仪器更高,同时功率、尺寸和重量也更低。c-FIRST 空中飞行计划于 2024 年火灾季节进行仪器测试和验证。我们预计 c-FIRST 太空验证将基于 2026 年或之后的空间技术验证机会。

触觉增强的辐射场 - CVF Open Access
我们提出了一个场景表示形式,我们称之为触觉的辐射场(TARF),它将视觉和触摸带入共享的3D空间。此表示形式可用于估计场景中给定3D位置的视觉和触觉信号。我们从一系列照片和稀疏采样触摸探针中捕获了场景的tarf。我们的方法利用了两个见解:(i)基于常见的触摸传感器建立在普通摄像机上,因此可以使用多视图几何形状中的方法对图像进行注册,并且(ii)在视觉和结构上相似的场景区域具有相同的触觉效果。我们使用这些见解将触摸信号注册到捕获的视觉场景中,并训练有条件的扩散模型,该模型带有从神经辐射场呈现的RGB-D图像,生成其相应的触觉信号。为了评估我们的方法,我们收集了一个TARF的数据集。此数据集比预先持有的现实世界数据集包含更多的触摸样本,并且为每个捕获的触摸信号提供了空间对齐的视觉信号。我们揭示了跨模式生成模型的准确性以及在下游任务上捕获的视觉效果数据的实用性。项目页面:https:// dou- yiming.github.io/tarf。

在神经辐射场中学习重新分解和内在分解
从神经辐射场中提取固有组件(例如重新传播和阴影)的任务越来越感兴趣。然而,当前方法在合成场景和孤立的对象上很大程度上有效,忽视了具有背景的真实场景的复杂性。为了弥补这一差距,我们的研究引入了一种与内在分解相关的方法。通过杠杆式的灯光变化,以生成伪标签,我们的方法为固有分解提供了指导,并需要地面真相数据。我们的方法以物理约束为基础,可确保各种场景类型的鲁棒性,并减少对预先训练的模型或手工制作的先验的依赖。我们在合成和现实世界数据集上验证了我们的方法,从而实现了令人信服的重新研究。此外,我们的方法对图像编辑任务的适用性展示了有希望的结果。

3D可见性 - 可见的可通用的神经辐射场,用于相互作用的手
神经辐射场(NERFS)是场景,物体和人类的有希望的3D代表。但是,大多数措施方法都需要多视图输入和每场培训,这限制了其现实生活中的应用。此外,熟练的方法集中在单个受试者的情况下,留下涉及严重障碍和挑战性视图变化的互动手的场景。为了解决这些问题,本文提出了一个可见的可见性 - 可见性的NERF(VA-NERF)框架,用于互动。具体来说,给定相互作用的手作为输入的图像,我们的VA-NERF首先获得了基于网格的手表示,并提取了相应的几何和质地。随后,引入了一个功能融合模块,该模块利用了查询点和网格顶点的可见性,以适应双手的特征,从而可以在看不见的区域的功能中进行重新处理。此外,我们的VA-NERF与广告学习范式中的新型歧视者一起进行了优化。与传统的分离器相反,该官员预测合成图像的单个真实/假标签,提议的判别器生成了一个像素的可见性图,为看不见的区域提供了精细的监督,并鼓励VA-NERF提高合成图像的视觉质量。互惠2.6m数据集的实验表明,我们所提出的vanerf的表现明显优于常规的nerfs。项目页面:https://github.com/xuanhuang0/vanerf。
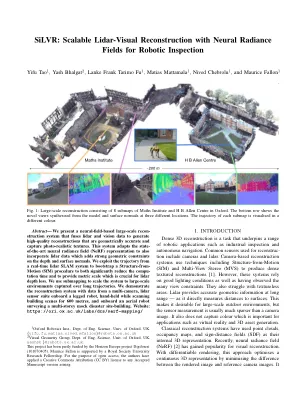
SILVR:可伸缩的LIDAR-VISUAL-VISUAL RETUSTRUTION,具有机器人检查的神经辐射场
摘要 - 我们提出了一个基于神经场的大规模重构系统,该系统融合了激光雷达和视力数据,以生成几何准确的高质量重建,并捕获光真逼真的纹理。该系统适应了状态的神经辐射场(NERF)表示,还结合了LiDAR数据,该数据在深度和表面正常上增加了强大的几何约束。我们利用轨迹从实时激光雷达大满贯系统来引导结构 - 从运动(SFM)程序进行启动,以显着降低组合时间,并提供对大暴力深度损失至关重要的度量标准。我们使用沉积将系统扩展到在长轨迹上捕获的大规模环境。我们通过来自多台摄像机,LIDAR传感器套件的腿部机器人的数据,在扫描600米的扫描建筑场景时进行手持式机器人,并在船上进行空中机器人,调查多层模拟模拟灾难现场建造的空中机器人。网站:https://ori.ox.ac.uk/labs/drs/nerf-mapping/

Zignerf:带有可逆生成神经辐射场
生成的神经辐射场(NERF)通过学习一组未经未介绍的图像的分布来综合多视图图像,表现出非常熟练的熟练程度。尽管现有的生成nerf具有在数据分布中生成3D一致的高质量随机样本的才能,但创建单数输入图像的3D表示仍然是一个巨大的挑战。在此手稿中,我们介绍了Zignerf,这是一种创新的模型,该模型执行零击生成的对抗网(GAN)倒置,以从单个脱离分布图像中生成多视图。该模型的基础是一个新型逆变器的基础,该逆变器映射到了发电机歧管的潜在代码中。毫无意义,Zignerf能够将对象从背景中解散并执行3D操作,例如360度旋转或深度和水平翻译。使用多个实数数据集对我们的模型的效率进行验证:猫,AFHQ,Celeba,Celeba-HQ和Compcars。