XiaoMi-AI文件搜索系统
World File Search SystemSONAR

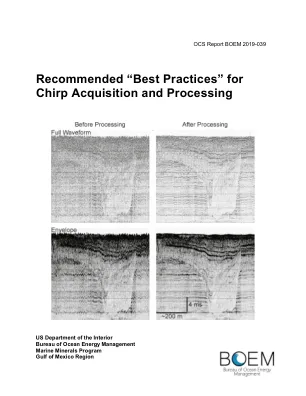
推荐CHIRP获取和处理的“最佳实践”
chirp声音反射系统,有时称为子底剖面,是对海底或湖床下沉积物的超高分辨率(〜十分尺度)成像的宝贵工具。chirp是一种由雷达社区开发的信号处理技术,用于改善回声回报的分辨率(Klauder等,1960)。该技术后来由声纳社区改编(Schock等,1989)。CHIRP信号是一种扫描的频率脉冲,通常在5-30毫秒(MS)之间,其频率在0.5 kHz到24 kHz之间,具体取决于传感器。CHIRP信号处理的基本特征是匹配过滤器(即应用反向卷积),带有已知的即将脉冲函数的返回信号,从理论上讲,该信号将从较长且复杂的声纳脉冲中崩溃,从近距离突击的响应中崩溃。chirp数据是在及时获得的,其中z轴是从chirp到反射器(具有声音响应的海底或更深层的层)的行程,然后返回chirp(双向时间或TWT)。一些CHIRP采集系统会根据水中假定的声速自动显示具有深度Z轴的数据(例如,每秒1500米);但是,记录的数据始终在TWT中。 水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。每秒1500米);但是,记录的数据始终在TWT中。水平轴是基于每个声纳ping的GPS导航,将其转换为沿调查轨道的距离。
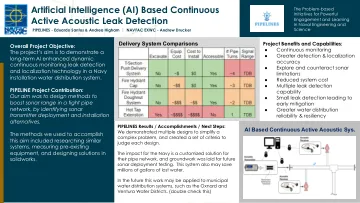


使用自主无人容器
摘要:银行上河床和地面设施的可视化对于分析条件,安全性和这种环境变化的系统至关重要。因此,在本文中,我们提出收集和处理来自各种传感器的数据(Sonar,Lidar,Multibeam Echosounder(MBES)和相机),以创建可视化以进行进一步分析。为此,我们从安装在自主,无人水文容器上的传感器中进行了测量,然后提出了一种数据融合机制,以使用水下和上方的模块进行可视化。融合包含有关经典图像和声纳的关键分析,点云的增强/减少,拟合数据和网格创建。然后,我们还提出了一个分析模块,该模块可用于比较和从创建的可视化中提取信息。分析模块基于分类任务的人工智能工具,有助于进一步与档案数据进行比较。使用各种技术测试了这种模型,以实现模拟和实际案例研究中最快,最准确的可视化。
遵守缓解措施的指导 3.20 避免考古资源
1) 如果您选择使用高分辨率调查数据进行评估,请根据《给承租人和经营人的通知》(NTL)第 2005-G07 号,使用足以提供 100% 侧扫声纳覆盖海底的线间距,在所有计划进行海底扰动活动的区域获取数据。例如,如果您计划的作业水深超过 400 米,并且您决定将井位或相关锚点移动最多 500 英尺(如 NTL 第 2009-G27 号所述),请确保调查覆盖的区域足够大,以解释这种变化。此外,可以使用之前收集的侧扫声纳数据,前提是它是使用 DGPS 定位收集的,并且具有足够的分辨率和质量,可供合格的海洋考古学家准确解释。如果使用多个数据集,则必须将所有数据合成为综合考古评估。 2) 如果您选择使用 ROV 调查进行评估,ROV 应配备声学定位和扇区扫描声纳。视频、声纳和导航都应录制到 DVD 中,以供查看。如果您打算在获得场地许可认证后立即开展已获批准的活动,则专业的海洋考古学家应在调查进行过程中观察调查情况,观察方式可以是亲自到场或通过远程互联网馈送,该馈送的质量和分辨率足以让考古学家进行分析。此外,考古学家必须能够与 ROV 驾驶员实时通信,以指导调查。如果发生视频或通信中断,则应在视频或通信恢复时从中断发生的位置继续调查。如果考古学家未能亲自到场从 ROV 控制室观察调查,他/她应在考古评估报告中通过审查记录的导航、声纳和视频文件证明调查已完成,项目区域得到充分覆盖,潜在目标未被忽略。3) 如果您提议拆除的结构位于之前未调查过的区块内,或者您的调查未涵盖拟议行动的所有影响,例如场地清理拖网、驳船锚、锚链、钢丝绳、电缆等,请使用常规调查仪器(即磁力计、侧扫声纳、海底剖面仪,数字记录并绑定到 DGPS 或其他相称的导航系统)在足够大的区域进行调查,以涵盖所有拟议的海底扰动活动。在水深超过 200 米(656 英尺)的地方,不需要使用磁力计。如果无法使用常规仪器,可以使用自主水下航行器 (AUV) 或深水拖曳系统获取这些数据。NTL 2005-GO7 提供了有关特定仪器的指导(http://www.boem.gov/Regulations/Notices-To-Lessees/2005/05-G07.aspx)。


包机和探险旅行
用于数据收集、观察和协作任务执行的卓越平台 Antipodes 拥有两个 1.47 米(58 英寸)半球形丙烯酸圆顶,为深海探险期间的直接科学观察和拍摄提供卓越的视野。她的容量允许来自多个学科的船员实时协作,因此检查不仅限于操作员指定的感兴趣区域,而是由船上人员的共识决定,从而允许不同的视角。得益于其全套导航和声纳设备,Antipodes 还能够在低能见度和多变的天气条件下全天候运行,使其船员能够及时、有效地对海洋环境进行调查。除了标准的导航和采样设备套件(包括机械臂、多波束声纳和高清成像功能)外,Antipodes 还具有完全可配置性,可满足研究和商业界最复杂的数据收集需求。
未分类 未分类
[P40A / TD006:潜艇 COAET]:TD006 潜艇通用操作分析和应用训练器 (COAET)COAET 是一种交互式基本技能和应用技能训练器。它允许引入新的舰队要求和升级。这些设备的目的是在潜艇部队人员进入完整的潜艇多任务团队训练器 (SMMTT) 之前为他们提供操作员和入门团队培训。它还提供补充训练以减轻使用率高的攻击中心训练器的负担。COAET 利用部分战术构建和最新声纳和战斗控制系统的模拟提供训练。这些设备提供的环境与船上的环境基本相同,从而使学生能够培养和保持支持舰队行动所需的攻击中心专业知识。还为 TEC、虚拟化战术控制 (VTAC) 集成、高级处理构建 (APB)/技术插入 (TI) 和声纳战术决策辅助 (STDA) 实施提供资金。

使用单束...
摘要 - 在Wobot机器人的定位中,由于电磁波衰减或由于水浊度而导致的光相机,它不能依靠传感器(例如GPS)。声纳对这些问题免疫,因此尽管空间和时间分辨率较低,它们仍被用作水下导航的替代方案。单光声声纳是传感器,其主要输出为距离。与Kalman滤波器(例如Kalman滤波器)结合使用时,这些距离读数可以纠正通过惯性测量单元获得的本地化数据。与多光束成像声纳相比,单光束声纳廉价地集成到水下机器人中。因此,本研究旨在开发使用单光声声和基于压力的深度传感器的低成本定位解决方案,以纠正使用卡尔曼过滤器的静止折线线性定位数据。从实验中,每个自由度的单束声纳能够纠正本地化数据,而无需复杂的数据融合方法。索引术语 - Kalman过滤器,本地化,声纳,内部机器人