XiaoMi-AI文件搜索系统
World File Search SystemSpacecraft

燃料/航天器操纵的最佳时间控制
2 Citron,S。J.,Dunn,S。E.和Meissinger,H。F.,“终端指导技术的终端指导技术”,AIAA Journal,第1卷。2,编号3,1964,pp。503 - 509。3 Cheng,R.K。,“终端指导Foramarssoftlander”,第八届国际太空技术与科学典礼论文集,日本东京,日本,1969年,pp。855 - 865。4 Cheng,R。K.,“测量师指导的设计考虑因素”,《航天器和火箭杂志》,第1卷。3,编号11,1966,pp。1569 - 1576。5 Ingoldby,R。N.,“维京行星登陆器的指导和控制系统设计”,《杂志指导,控制与动力学》,第1卷。1,编号3,1978,pp。189 - 196。6 McInnes,C。R.,“重力转向下降的非线性转换方法”,《期刊指导,控制》,第19卷,第1卷,第1期,1995年,pp。247,248。7墨菲,g。M.,普通微分方程和Theer solution,van Nostrand,纽约,1960年,pp。26,27。

ASEN 5148 – 航天器设计课程大纲
学生和教师都有责任维护适当的学习环境。不遵守此类行为标准的人可能会受到纪律处分。专业礼貌和敏感性对于涉及种族、肤色、国籍、性别、怀孕、年龄、残疾、信仰、宗教、性取向、性别认同、性别表达、退伍军人身份、政治派别或政治哲学的个人和话题尤其重要。班级名册会提供给教师,其中包含学生的法定姓名。我很乐意满足您使用其他名称或性别代词来称呼您的请求。请在学期初告知我这一偏好,以便我对我的记录进行适当的更改。有关更多信息,请参阅课堂行为政策Links to an external site. 和学生行为准则Links to an external site. 。

软件在航天器事故中的作用 - Nancy Leveson
摘要:解决任何问题的第一步也是最重要的一步是充分了解问题,以便创建有效的解决方案。为此,研究了几起与软件相关的航天器事故,以确定常见的系统性因素。虽然每起事故的细节各不相同,但都发现了与安全文化、管理和组织以及技术缺陷有关的非常相似的因素。这些因素包括自满和低估软件风险、责任和权力分散、沟通渠道有限和信息流不畅、系统和软件工程不充分(规范差或缺失、不必要的复杂性和软件功能、没有适当安全分析的软件重用、违反数字组件的基本安全工程实践)、审查活动不足、系统安全工程无效、测试和模拟环境有缺陷以及人为因素工程不足。本文讨论了这些因素中的每一个,并提出了一些关于如何在未来项目中消除它们的建议。

软件在航天器事故中的作用 - Nancy Leveson
摘要:解决任何问题的第一步也是最重要的一步是充分了解问题,以便创建有效的解决方案。为此,研究了几起与软件相关的航天器事故,以确定常见的系统性因素。虽然每起事故的细节各不相同,但都发现了与安全文化、管理和组织以及技术缺陷有关的非常相似的因素。这些因素包括自满和低估软件风险、责任和权力分散、沟通渠道有限和信息流不畅、系统和软件工程不充分(规范差或缺失、不必要的复杂性和软件功能、没有适当安全分析的软件重用、违反数字组件的基本安全工程实践)、审查活动不足、系统安全工程无效、测试和模拟环境有缺陷以及人为因素工程不足。本文讨论了这些因素中的每一个,并提出了一些关于如何在未来项目中消除它们的建议。

航天器驾驶、手动控制设计概述...
简介 本报告介绍了使航天器更适合人类操作的技术。从最高层次开始,第一部分介绍了一般航天器驾驶和工作负荷,提出了一个概念框架,即 OODA 循环,作为改进工具。作为一般可操作性的一个子集,第二部分介绍了手动控制。本文介绍了从全手动到全自动的控制范围概念,以及在现代航天器中实现手动控制能力的基本原理。还提供了阿波罗和航天飞机的手动控制能力摘要作为成功实施的示例。成功的手动控制需要令人满意的操控品质,第三部分提供了该主题的高级摘要。

航天器相对运动的非线性动力学与控制
Andrew J. Sinclair,主席,航空航天工程副教授 Subhash C. Sinha,联合主席,机械工程名誉校友教授 David A. Cicci,航空航天工程教授 John E. Cochran Jr.,航空航天工程名誉校友教授 George Flowers,研究生院院长

XGEO 航天器利用地面观测方法...
太空产业正在蓬勃发展——从最近 Artemis 计划第一阶段的成功,到即将推出的为九次登月做准备的商业月球有效载荷服务 (CLPS) 计划。因此,必须调整用于靠近地球轨道的航天器的观测程序,以适应地球同步轨道 (GEO) 以外的太空区域 (XGEO)。然而,围绕 XGEO 存在着长期挑战,例如三体问题及其后续轨道的复杂性,以及感知比 GEO 远许多倍的物体的困难。这些挑战使得大多数传统的航天器跟踪、检测、成像和观测生成技术无法使用。

ASEN 6116航天器生命支持系统
学生出勤是您作为工程师和科学家培训的重要组成部分。教室和实验室内的任何时候都有亲切的气氛。尊重并对其他学生有礼貌。保持安静的工作氛围;噪音过多会分散他人的注意力。协助您的研究生。这是您未来培训的重要组成部分。您通常会在小组环境中工作,因此要成为负责任的团队成员。当您需要与他人共享设备时,传输数据/代码等,以专业的方式进行。我们希望学生在研究和出版物中遵循最高的道德标准。窃,数据操作等。是不道德行为的例子,不容忍。如果伦理线不清楚,讲师或您的顾问可以帮助您和/或将您转介到适当的渠道。
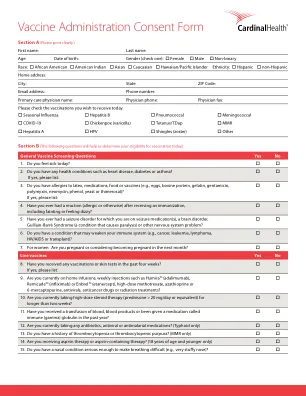
疫苗管理同意书 - 印刷 - 航天器
我了解疫苗信息报表(VIS)中所述的疫苗接种的好处和风险,并在此同意书中提供了副本。我要求将疫苗送给我或下面指定的人,我代表我被授权签署此同意和释放的未成年人。