XiaoMi-AI文件搜索系统
World File Search SystemSpacecraft

航天器制导的深度强化学习
本文介绍了一种名为深度制导的新技术,它利用人工智能的一个分支——深度强化学习,使制导策略可以学习而不是设计。深度制导技术包括一种学习制导策略,该策略将速度命令提供给传统控制器进行跟踪。控制理论与深度强化学习相结合,以减轻学习负担并促进训练系统从模拟到现实的转移。在本文中,在模拟和实验中考虑了一个概念验证航天器姿态跟踪和对接场景,以测试所提方法的可行性。结果表明,这样的系统可以在模拟中完全训练并以相当的性能转移到现实中。
探索太阳系 II – 航天器
先驱者金星一号 先驱者金星二号 ISEE-3 金星11号 金星12号 金星13号 金星14号 金星16号 织女星1号 织女星2号 先驱者号 火星探测车 火卫一号 火卫二号 麦哲伦号 伽利略号 飞天号 尤利西斯号 耀光号 火星观测车 克莱门斯内号 风之谷号 舒梅克号 火星全球勘测车 火星6号 火星探路者号 ACE 卡西尼-惠更斯号 月球勘探车 希望号 深空一号 火星气候探测器 火星极地着陆器 深空二号 星尘号2001号 火星奥德赛号
基于石墨烯的过滤介质用于航天器饮用...
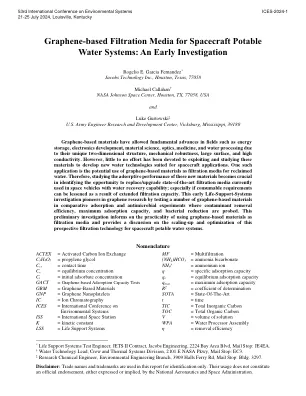
基于石墨烯的材料允许在储能,电子开发,材料科学,光学,药物和水加工等领域的基本进展,这是由于其独特的二维结构,机械鲁棒性,较大的表面和高电导率。但是,几乎没有努力利用和研究这些材料来开发适合航天器应用的新水技术。这样的应用是将基于石墨烯的材料作为过滤介质的潜在用途。因此,研究这些新材料的吸附性能对于确定目前在具有水回收能力的太空车辆中使用/升级最先进的过滤媒体的机会至关重要。特别是如果由于扩展过滤能力而可以减少可消耗量的要求。通过在比较吸附和抗菌实验中测试许多基于石墨烯的材料,在石墨烯研究中进行了早期的生命支持系统研究,其中探测了污染物的去除效率,最大吸附能力和细菌减少的抗菌实验。这项初步调查为使用基于石墨烯的材料作为过滤介质提供了实用性,并讨论了该航天器饮用水系统的这种前瞻性过滤技术的扩展和优化。

等离子表面相互作用:对(航天器)表面的影响
抽象的月亮 - 阿波罗计划期间通过轨道和表面实验观察到血浆相互作用。光子和带电的颗粒为月球表面充电,并形成薄的debye-比例等离子鞘,在日光下和阴影半球上方。此外,电子的平均热速度,导致Debye鞘在航天器周围形成。光电子和等离子体鞘直接在表面上吸收的灰尘谷物,这些粉尘呈凸起,随后充电的尘埃流动呈负电荷,并与降落的航天器的正面表面接触。作为电荷载体,灰尘颗粒被吸引或排斥在带电的航天器上。环境等离子体和高次级排放的低密度也有助于横杆上的表面充电速率高。电荷在航天器和航天器组件上的积累是由航天器与空间等离子体,能量粒子流和太阳光子相互作用而产生的,该太阳光子通常由游离电子和光子驱动。据报道,归因于航天器充电的各种效果是导致许多操作异常的原因,包括操作异常组件故障,伪造命令,物理航天器表面损伤以及航天器表面材料热和电特性的降解。等离子体的研究 - 表面相互作用显示出有希望的结果,用于开发新型的粉尘缓解航天器充电安全管理的策略。关键字:等离子表面相互作用,等离子鞘,(航天器)表面充电本文旨在调查减轻月球尘埃作为等离子表面相互作用的载体的策略,从而导致航天器充电。

纳米结构的Tialcun和Tialcucn涂层
获得纳米结构化的氮化物和碳耐碳涂层的最常见方法之一是反应性木ementron溅射(RMS)。RMS方法使使用特定的光学和机械性能形成高质量的涂层。通过离子血浆方法形成涂料的一个重要问题是它们的组成,结构以及其物理和机械性能的预测。12在许多已发表的研究12 - 15中,已经表明,所有沉积参数都在涂层结构和机械特征中认真对待。航天器的可靠操作需要使用具有抗裂缝特性的耐磨涂层。特别是,陀螺仪系统的摩擦学元素(例如推力轴承)需要用硬抗裂缝覆盖
HERA航天器的LIDAR高度计概念
摘要。小行星影响与挠度评估(AIDA)是NASA DART任务与ESA HERA任务之间的合作。目的范围是通过动力学碰撞研究小行星挠度。DART航天器将与Didymos-B碰撞,而地面站监视轨道变化。HERA航天器将研究影响后情况。HERA航天器由主航天器和两个小立方体组成。HERA将通过摄像头,雷达,卫星到卫星多普勒跟踪,LIDAR,地震测定法和重力法监测小行星。在本文中报道了LIDAR工程模型高度计Helena上的第一次迭代。Helena是一个TOF高度计,可提供时间标记的距离和速度测量值。LIDAR可用于在小行星导航附近的支持,并提供科学信息。Helena设计包括一个微芯片激光和低噪声传感器。这两种技术之间的协同作用使得可以开发一种紧凑的仪器,以达到14公里的范围测量。热力学和辐射模拟。该设计受到振动,静态和热条件的影响,并且可以通过结果结论,望远镜符合随机振动水平,静态负载和工作温度。
可填写的疫苗接种同意书 - SpaceCraft
我了解疫苗信息声明 (VIS) 中所述的疫苗接种的好处和风险,此同意书和免责声明中提供了此声明的副本。我请求将疫苗接种给我或以下人员(我声明我有权为其签署此同意书和免责声明的未成年人)接种。
Td/Tdap 疫苗同意书 - SpaceCraft
我已阅读或已让别人向我解释疫苗信息声明中有关破伤风、白喉和/或百日咳 (Td/Tdap) 疫苗的信息。我有机会提出问题,并得到了令我满意的答复。我相信我了解破伤风、白喉和/或百日咳 (Td/Tdap) 疫苗的益处和风险,并要求将疫苗接种给我或我有权代表其提出此请求的下述人员。如果我或我有权代表其提出此请求的下述人员感染破伤风、白喉、百日咳、其他疾病或在接种此 Td/Tdap 疫苗后出现任何其他不良反应,我放弃并免除我或任何由我或通过我提出索赔的人现在或今后可能对 Aston Pharmacy Home Health Center 及其各自的董事、官员、员工和代理人提出的所有索赔,以承担任何损害或伤害。我了解我可能需要承担保险不承保的费用。我理解,如果我不提供正确的保险信息,我可能还要承担费用。对于医疗保险受益人:我授权发布处理此索赔所需的任何医疗或其他信息。我还要求向我本人或接受分配的一方支付政府福利。

薄膜技术在航天器系统中的应用
尽管真空沉积薄膜通常被视为纯光学领域,但光学薄膜技术在美国太空计划中的应用可以追溯到 1957 年末至 1958 年初的先锋一号任务,当时该技术用于航天器的热控制。从更广泛的意义上讲,无论是用于温度控制还是光学应用,薄膜表面涂层的重要性都源于其与太空环境的直接接触,以及来自太阳、地球或更具选择性的目标的辐射能。在光学应用中,薄膜涂层启动了对到达的电磁波的信息内容进行重新形成的进程,或者通过与严酷的太空环境的辐射交换定量定义了涂层表面的使用寿命。当然,除了真空沉积薄膜之外,其他表面处理也用于热和光学空间应用,但本文将重点介绍真空沉积薄膜的独特特性及其在特定空间相关应用中的优势。

航天器等离子体风洞退役试验...
在这一活动框架内,在 DLR L2K 等离子风洞设施中测试了复杂的设备。这些测试对于了解该设备的解体现象、改进风险评估和实施有效的 D4D 措施至关重要。测试结果分析为得出针对报废设计的建议提供了更好的理解。需要进一步调查,同时还要考虑改进实验设置。因此,测试后数据分析将更好地了解所选硬件的破坏过程,以利于预测模型和针对报废设计的建议。结果将有助于更深入地了解 D4D,从而有利于航天工业的早期太空任务研究。