XiaoMi-AI文件搜索系统
World File Search SystemTouch

touché23-valueeval数据集用于识别参数背后的人类价值
摘要虽然人类价值观在使论据有说服力中起着至关重要的作用,但我们目前缺乏必要的广泛数据集来开发大规模分析这些论点的价值的方法。为了解决此差距,我们介绍了Touché23-ValueEval数据集,这是Webis-Argvalues-22数据集的扩展。我们收集并注释了另外的4 780个新参数,将数据集的大小加倍至9 324个参数。这些论点来自六个不同的来源,涵盖了宗教文本,社区讨论,自由文本论点,报纸社论和政治辩论。按照原始数据集中建立的方法,由三名人群工人注释了每个参数,以提供54个人类价值观。touché23-valueeval数据集用于Semeval 2023任务4。ValueVal:识别参数背后的人类价值观,其中变压器模型的合奏表现出最新的性能。此外,我们的实验表明,一个微调的大语言模型Llama-2-7b可以取得可比的结果。

Brace Touch:一种可靠的、抗湍流的、用于交互式驾驶舱的多点触控交互技术
摘要。驾驶舱(也称为飞行甲板)是飞机的交互式环境,使飞行员和副驾驶员能够监视和控制飞机系统。允许机组人员使用键盘和光标控制单元通过显示单元控制飞机系统是基于 ARINC 661 标准的新一代驾驶舱的主要功能之一。飞机制造商目前正在研究在未来驾驶舱中部署触摸交互,ARINC 661 标准(补充 7)为此目的进行了扩展。虽然触摸交互在性能方面表现出色(从用户的角度来看),但它们的可靠性是一个尚未解决的重要问题。本文提出了一种触摸设备交互技术——Brace Touch,旨在通过提供解决开发、自然和操作故障的解决方案来提高触摸交互的可靠性。
Sliman Bensmaia,Touch神经科学领域的主要专家,1973 - 2023年 - Uchicago Medicine
Bensmaia于1995年在夏洛茨维尔的弗吉尼亚大学获得学士学位。作为研究计算机工程和认知科学的本科生,他想成为一名音乐家。他是一位有成就的钢琴家,但是他的父母,都是学者,都说服了他申请研究生院。他在北卡罗来纳大学教堂山(UNC)的大学中被接受,在那里他在心理学实验室工作,研究了触觉。他于2003年获得UNC的神经生物学辅修学位,并于2003年担任博士后研究员和副研究科学家。

药房研究人员阐明了大脑如何处理触觉
Stobart补充说,触摸对象时人类在繁忙十字路口的高峰时段的流量就像高峰时段一样。“星形胶质细胞是将信息流向目的地的交通信号灯。当NMDA受体信号在星形胶质细胞中破坏时,就像左转的左转光一样。某些信息流可以通过交叉路口直接继续,但没有左转意味着某些信息无法达到目标。”

KFD 900 AeroVue Touch 主飞行显示系统 AML...
霍尼韦尔机密:本版权作品和所有信息均为霍尼韦尔公司所有,包含商业机密,未经霍尼韦尔公司事先书面许可,不得全部或部分使用、复制或披露。保留所有权利。版权所有 © 2019 霍尼韦尔国际公司。BendixKing 和 BENDIXKING 徽标是霍尼韦尔国际公司美国专利商标局的注册商标。本文档在发布前使用 KFD-900 工作集中的 Subversion 进行管理。
Pearlcoat™ ACTIVA 聚合物为热成型/共挤表面带来柔软触感
路博润工程聚合物公司开发了一种柔软触感材料,可自然粘附于各种基材上,具有出色的防刮、防磨损和防滑(干燥表面)性能,并为基于不同塑料(极性和非极性)的最终共挤部件提供最清洁的防静电解决方案。TPU 层具有更长的使用寿命、顶级的机械性能和可回收性*。除了柔软触感之外,其突出的特点是其低光泽哑光外观,比标准 TPU 更好。
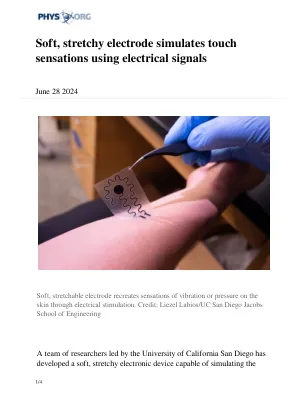
柔软的弹力电极使用电信号模拟触摸感觉
聚合物电极将激光切割成弹簧形的同心设计,并连接到硅基板上。“此设计可增强电极的可伸缩性,并确保电流靶向皮肤上的特定位置,从而提供局部刺激以防止任何疼痛。” Abdulhameed Abdal博士说。加州大学圣地亚哥分校的机械和航空航天工程系的学生和该研究的另一位联合首先作者。Abdal和Blau与UC San Diego Nano Engineering本科生Yi Qie,Anthony Navarro和Jason Chin合成电极的合成和制造。

在各种 HMI 应用中实现高精度电容式触摸传感器
预计到 2029 年,全球 HMI 市场将以 7.90% 的复合年增长率增长。近年来,随着 HMI 技术的发展,改善 UX(用户体验)和 UI(用户界面)以增加产品价值变得越来越重要。在这样的市场条件下,对电容式触摸传感器的需求日益增长,这种传感器可以根据外壳的设计理念部署在木材或透明丙烯酸等各种材料上作为操作面板,或作为基于 LED 的用户指南以提供易用性。与传统的物理按钮不同,电容式触摸传感器没有弹簧或其他活动部件,因此不易因磨损而发生故障,并可以延长产品寿命。除了产品寿命长之外,操作面板完全平坦且没有缝隙,易于采取措施防尘和防水滴,并增强了清洁和其他维护工作的便利性。该技术以往主要用于要求高功能性和设计性的高端家电,但近年来正在渗透到对清洁度要求较高的低端家电、工业设备、医疗保健设备等。

人类后顶皮层中实际和想象的触摸的神经编码
摘要在人类后顶叶皮层(PPC)中,单个单元编码具有部分混合表示形式的高维信息,使少量神经元可以编码与运动计划,执行,认知和感知相关的许多变量。在这里,我们测试了以前证明的PPC神经元种群是否同样参与了体验域。,我们在实际的触摸表现和触觉成像任务中记录了人类临床试验参与者的PPC中的神经元。神经元用双侧接受场在短潜伏期中编码了实际触摸,并通过身体部位组织,并覆盖了所有经过测试的区域。触觉图像任务引起了身体部分的反应,该反应与实际触摸共享神经基板。我们的结果是人类PPC中触摸编码及其在触觉成像任务中的认知参与的第一个神经元水平的证据,这可能反映了语义处理,注意力,感官预期或想象中的触摸。

在各种 HMI 应用中实现高精度电容式触摸传感器
预计到 2029 年,全球 HMI 市场将以 7.90% 的复合年增长率增长。近年来,随着 HMI 技术的发展,改善 UX(用户体验)和 UI(用户界面)以增加产品价值变得越来越重要。在这种市场条件下,对电容式触摸传感器的需求日益增长,这种传感器可以根据外壳的设计理念部署在木材或透明丙烯酸等各种材料上作为操作面板,或作为基于 LED 的用户指南以提供易用性。与传统的物理按钮不同,电容式触摸传感器没有弹簧或其他活动部件,因此不易因磨损而发生故障,并可以延长产品寿命。除了产品寿命长之外,操作面板完全平坦且没有缝隙,易于采取措施防尘和防水滴,并增强了清洁和其他维护工作的便利性。该技术以往主要用于要求高功能性和设计性的高端家电,但近年来正在渗透到对清洁度要求较高的低端家电、工业设备、医疗保健设备等。