XiaoMi-AI文件搜索系统
World File Search SystemVLA
JAR-VLA
(3) 在起落架和襟翼处于任何位置时,以 1.2 VSI 的垂直、稳定滑行,并且在功率条件下不超过最大连续功率的 50%,当滑行角增加到适合该类型飞机的最大值时,副翼和方向舵的控制运动和控制力必须稳定增加(但不一定按恒定比例增加)。在较大的滑行角下,直到使用全方向舵或副翼控制或获得 JAR-VLA 143 中包含的控制力极限为止,方向舵踏板力不得反转。滑行必须有足够的倾斜度以保持恒定的航向。快速进入最大滑行或从最大滑行恢复不得导致失控的飞行特性。 (b) 双控制(或简化控制)飞机。双控飞机的稳定性要求如下:飞机的方向稳定性必须通过以下方式来证明:在每种配置下,飞机都可以快速地从一个方向的 45 英寸倾斜度滑向相反方向的 4 5 度倾斜度,而不会出现危险的滑行特性。飞机的横向稳定性必须通过以下方式来证明:当放弃控制两分钟时,飞机不会呈现危险的姿态或速度。这必须在适度平稳的空气中进行,飞机以 0-9 VH 或 Vc(取较低者)进行直线平飞,襟翼和起落架收起,重心后移。

VLA模型专家协作,用于双向操纵学习
摘要 - 视觉语言动作(VLA)模型的出现已经引起了机器人的基础模型。尽管这些模型取得了显着改进,但它们在多任务操作中的概括仍然有限。本研究提出了一个VLA模型专家集合框架,该框架利用有限的专家行动来增强VLA模型性能。这种方法相对于手动操作减少了专家工作量,同时提高了VLA模型的可靠性和概括。此外,在协作期间收集的操纵数据可以进一步完善VLA模型,而人类参与者同时提高了他们的技能。这个双向学习循环增强了协作系统的整体性能。各种VLA模型的实验结果证明了所提出的系统在协作操作和学习中的有效性,这是通过跨任务的成功率提高的。此外,使用大脑计算机界面(BCI)验证表明,协作系统通过在操纵过程中涉及VLA模型来提高低速动作系统的效率。这些有希望的结果为在机器人技术基础模型时代推进人类机器人的互动铺平了道路。(项目网站:https://aoqunjin.github.io/expert-vla/)索引术语 - 人类 - 罗伯特协作;人为因素和人类因素;从演示中学习

移动性VLA:多模式指令导航,长期...
摘要:导航研究中的一个难以捉摸的目标是建立一个智能代理,该智能代理可以理解包括自然语言和IM的多模式说明,并执行有用的导航。为了实现这一目标,我们研究了一个广泛有用的导航任务,我们称之为多模式指令导航,该导航带有恶魔之旅(MINT),其中通过预先录制的演示视频提供了先验的环境。视觉语言模型(VLM)的最新进展在实现这一目标方面表现出了有希望的途径,因为它展示了感知和推理多模式输入的能力。为了解决薄荷,我们提出了移动性VLA,这是一种层次视觉语言行动(VLA)导航政策,将环境理解和长篇小说VLM的常识推理能力结合在一起,以及基于拓扑图的强大的低级导航策略。高级策略由一个长篇小说VLM组成,该VLM将演示游览视频和多模式用户指令作为输入,以在旅行视频中找到目标框架。接下来,一个低级策略使用目标框架和构造的拓扑图来在每个时间步中生成机器人动作。我们在836M 2现实世界环境中评估了移动性VLA,并表明Mobility VLA在以前未解决的多模式指令中具有很高的端到端成功率,例如“我应该在哪里返回?”拿着一个塑料箱。可以在此处找到一个展示移动性VLA的视频:youtu.be/-tof Q8 5S

早期融合有助于视力语言动作模型更好地
摘要:视觉语言动作(VLA)模型的最新进展可以使机器人根据语言或基于目标的说明执行广泛的任务。这些VLA模型通常将文本和图像编码为脱节令牌,从而生成与给定指令保持一致的动作。这要求VLA模型同时执行视觉语言理解和精确的闭环控制,从而给他们带来重大挑战,以使其概括为新环境。然而,对比的预训练的VLM,例如剪辑,已经具有视觉对齐能力,这些功能被当前的VLA模型未被充分利用。在本文中,我们提出了早期的Fusion VLA(EF-VLA),这是一种新颖的VLA架构,通过执行早期融合来利用Clip的视觉理解,在传递到变压器政策之前,提取与任务指导相关的细粒度视力语言令牌。ef-vla保持VLM冷冻,允许其有效执行看不见的任务而无需进行精细调整,这通常会降低概括能力。仿真和现实世界实验表明,EF-VLA在不同任务上的最先进的VLA模型优于最先进的VLA模型,并且在看不见的环境中具有重要的概括能力。
NAWCAD LAKEHURST 统计数据 - Harry Kahn Associates, Inc.
• 目视着陆辅助设备 (VLA) 实验室 – 通过维护当前部署的 VLA 系统的最新服务变更配置,为机队 VLA 系统提供支持。该实验室还用于开发、制造和排除系统故障。当前的 VLA 系统包括:改进型菲涅尔透镜光学着陆系统 (IFLOLS)、手动操作目视着陆系统 (MOVLAS)、远程对线系统 (LRLS)、标记和照明设备、着陆信号官显示系统 (LSODS)、综合发射和恢复电视监视 (ILARTS) 系统、地平线参考集 (HRS)、垂直短距起降 (VSTOL) 系统、直升机操作和监视系统 (HOSS) 以及各种其他电子系统。
用于无障碍科学教育的人工智能工具
摘要:无障碍科学教育中最重要的问题之一是创建一个可供盲人学生或有视力障碍 (VI) 学生使用的实验室工作区。虽然这些学生通常可以参加科学讲座,但他们通常无法充分参与动手实验室工作。目前解决这个问题的重点是提供特殊便利,例如要求有视力的实验室伙伴完成动手工作。尽管近年来现代科学教育中实验室设备的可访问性有所提高,但有视力障碍的学生往往仍然是被动学习者。在这项工作中,我们使用亚马逊网络服务 (AWS)、亚马逊 Alexa 技能套件 (ASK)、Alexa 智能扬声器和微控制器 (Raspberry Pi) 开发了一种新的人工智能工具,即 MSU Denver 虚拟实验室助手 (VLA)。VLA 可以与其他访问技术和设备结合用作实验室中的虚拟助手。VLA 允许有视力障碍的学生仅使用语音控制自行完成动手实验室工作。可以通过任何智能手机或 Amazon Echo 设备访问 VLA,以协助一般的科学实验室程序。VLA 旨在适用于不同的科学实验室工作。它还与其他常见的无障碍电子设备兼容,例如 Talking LabQuest (TLQ)。我们相信 VLA 可以促进 VI 学习者的融入,并有利于一般的无障碍科学教育工作。
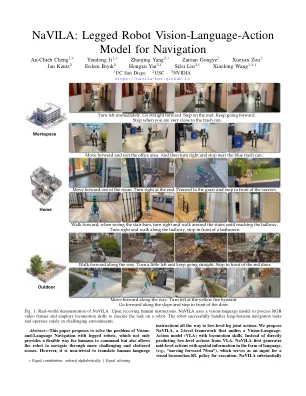
navila_paper.pdf
执行视觉和语言导航(VLN)的能力已成为现代机器人系统中的基础组成部分。使用VLN,一个机器人有望根据语言说明[1-6]在没有提供的地图的情况下在看不见的环境周围导航。这不仅为人类提供了更好的相互作用,而且还通过语言加强了跨场所的概括。在本文中,我们通过腿部机器人(例如四倍或人形生物)进一步扩展了VLN的研究。使用腿而不是轮子可以使机器人在更具挑战性和混乱的场景中导航。如图1,我们的机器人可以在狭窄的人行道上浏览一个凌乱的实验室空间,从房屋中的房间过渡到房间,以及解决户外挑战性的环境,例如带有小岩石,孔和槽的不均匀地形。要将语言转换为动作,机器人需要对输入语言进行推理,并执行闭环计划以及低级控制。随着大语言模型(LLM)和视觉模型(VLM)的最新进展,已经开发了几个端到端视觉语言动作(VLA)系统[7-9]。这些系统对具有大规模的机器人操纵演示的通用Propose VLM微调,以产生低级动作。虽然在单个模型中统一推理和执行令人着迷,并且表现出令人鼓舞的结果,但值得深入研究以下问题:是否有更好的方法来代表量化的低级命令以外的动作?毕竟,LLM和VLM主要接受了自然语言的培训。当我们需要将推理转换为精确的非语言行动时,统一推理和执行变得具有挑战性。受到VLM [10,11]的最新进展的启发,我们提出了纳维拉(Navila)的提议,这是一个针对腿部机器人VLN的两个级别框架:VLM的两级框架,可以很好地输出中级动作(VLA),以“右转30度”的策略,以及训练的范围,以“转向30度”。VLA的中级动作输出无需低级命令传达位置和方向信息。该框架的优点是三个方面:(i)通过将低级执行与VLA分解,可以通过交换低级策略来在不同的机器人上应用相同的VLA; (ii)将动作表示为中级语言指令,可以通过不同的数据源进行VLA培训,包括真实的人类视频和推理质量检查任务。这可以增强推理功能,而不会过度拟合特定的低级命令,并可以利用现实世界数据进行概括; (iii)Navila在两个不同的时间尺度上运行:VLA通常是一个大型且计算密集的模型,以较低的频率运行,提供高级导航命令;运动策略实时运行。这种双频方法允许

llara:增压机器人学习数据
视觉语言模型(VLM)最近被利用以生成机器人动作,形成视觉语言动作(VLA)模型。然而,直接适应验证的VLM来进行机器人控制仍然具有挑战性,尤其是当受到有限数量的机器人示范限制时。在这项工作中,我们介绍了llara:l arge l arguage and robotics a ssistant,该框架将机器人动作策略作为视觉文本对话制定,并通过视觉视觉视觉中的视觉音调调谐到计算机视觉中的成功激励到有效的VLA中,从而有效地将VLM转移到强大的VLA中。首先,我们提出了一条自动化管道,以生成来自外部行为克隆数据集的机器人的对话风格的指令调整数据,将机器人动作与图像像素辅助材料对齐。此外,我们通过定义六个辅助任务以自我监督的方式增强了此数据集,而无需任何其他操作注释。我们表明,使用有限数量的此类数据集进行的VLM FINETUNENET可以为机器人控制产生有意义的行动决策。通过跨模拟和现实世界的实验,我们证明了Llara在保留大语言模型的概括能力的同时,实现了状态的性能。代码,数据集和预处理的模型可在https://github.com/lostxine/llara上找到。

巨型语言模型的机器人AI技术趋势
API Application Programming Interface BC Behavior Cloning BERT Bidirectional Encoder Representations from Transformers CaP Code - as - policies GPT Generative Pre - trained Transformer LLM Large Language Model LMM Large Multimodal Model LMP Language Model generated Programs PaLI Pathways Language and Images PaLM Pathways Language Model RL Reinforcement Learning RT Robotics Transformer ViT Vision Transformer VLA Vision - Language - Action VLM Visual Language Model VQA Visual问题回答