XiaoMi-AI文件搜索系统
World File Search SystemVLN

对视觉预测的行动推论 - 和...
视觉和语言导航(VLN)engoss从移动性的角度使用语言和视觉输入与自动驾驶汽车相互作用。该领域的大部分工作都集中在空间推理和视觉信息的语义基础上。但是,基于现场行人的行为的推理并不是那么考虑。在这项研究中,我们提供了一个VLN数据集,用于针对目标预测,以研究当前VLN模型执行动作推断的程度。我们介绍了一个众包过程,以两个步骤构建该任务的数据集:(1)考虑行人的下一个行动,考虑行人的下一个行动,考虑了行人的下一个行动,考虑行人的下一个动作。我们对目标预测的模型的基准测试结果使我们相信这些模型可以学会推理动作的效果以及对某个特定目的地的目标的效果。但是,仍然有很大的改进范围。

评估人类协作:...
远见和语言导航(VLN)在近年来引起了人们的关注,并且已经出现了许多方法来推动其发展。基础模型的显着成就已塑造了VLN研究的挑战和方法。在这项调查中,我们提供了自上而下的评论,该评论采用了一个有原则的计划和推理的框架,并强调了当前的方法和未来的机会,以应对VLN挑战。我们希望我们的深入讨论能够提供宝贵的资源和见解:一方面,以记录该领域模型的进度和机会以及在该领域的基础模型的潜在作用,另一方面,在VLN中组织不同的挑战和解决方案以向基础模型研究人员组织不同的挑战和解决方案1。

手势引导的户外视觉和语言导航
视觉和语言导航(VLN)任务涉及使用语言命令导航移动性,并在开发自动移动性的接口中应用。在这种情况下,自然的人类交流还构成了手势和凝视等非语言提示。这些手势引导的指示已在人类机器人的互动系统中进行了探索,以有效相互作用,特别是在对象引用表达式中。ever,在户外VLN任务中应对基于手势的表达式的著名差距。为了解决这个问题,我们介绍了一个新颖的数据集,用于带有示范表达式的手势引导的户外VLN指令,并重点介绍了复杂的指令,以重新引导命令输入方式之间进行多跳的推理。此外,我们的工作还包括对收集数据的全面分析以及针对现有数据集的比较评估。

视觉导航的体积环境表示
Vision语言导航(VLN)要求代理在基于视觉观察和自然语言说明的3D环境中导航。很明显,成功导航的关键因素在于全面的场景理解。以前的VLN代理使用单眼框架直接提取透视视图的2D特征。虽然很简单,但他们为捕获3D几何和语义而努力,导致部分不完整的环境代表。为了实现具有细粒细节的全面3D表示,我们引入了体积环境(VER),将物理世界脱氧于结构化的3D细胞中。对于每个单元格,通过2D-3D采样将多视图2D特征归纳到如此统一的3D空间中。通过对VER的粗略到纤维特征进行推断和多任务学习,我们的代理人可以共同预测3D占用率,3D房间布局和3D边界框。基于在线收集的vers,我们的代理构成了体积状态估计,并构建情节内存以预测下一步。实验结果表明,我们从多任务学习的环境表示导致了VLN的可观绩效提高。我们的模型在VLN基准(R2R,Reverie和R4R)之间实现了最新的性能。

b“)#'*'..'$)*'&'%3&*$'%&'%&'$ $'*'*' - $。'5 $。'5 $。'6 7 899:; <= <>?7@aabc <= <9:; <= <= <> <= <>?; <= <>?;?7d9pmln7 = ln? qljf7i <= <>?; s =?:?; dqlm7jifl:i \\ d8:?xljp?i \\\\\\\\\\\\\\\\\\\\\\\\ dey?l:n79pmln7 =?lj7d8:?xljp?xljp?i7j?i7j?7cljh>?7dwiwi7 =? q?x?p?<:\\ db <:n7y?<:lwpi?ihi8:?idas9:; <= <>?7vln?; 7dcaolj7jn \\ dqlm7jifl:i>?c?; 7 = a;? :nw:il> j7ilnq?7>:\\ qlm7jifl:idb <=?> :: \\ dey?l:n79pmln7 =?lj <9jn?:lv7hj?y?7:\\ dl? ahmm?ld9:g <= <>?lh:n _dlhf7i <= <>?ldw :: ljlvln?y?:ld8:ld8:?xljp?inipg =?inipg =?ghfcl?nl = glj> dcl? vln?; 7 = 9:; <= <> \\ d8:?xljp?i \\
b“)#*''..'$)*'&'&'3&*$'%&'$'$'$'*' - $。 div>$ 5。 div>'6 7 899:<= <>? 7@aabc <= <9:; <= <>? div>;; 7 = 7:ntumlj? fl:i7 = vln?;;? div>:ld; 89v7 = 7ii? div>_lhf7i <= <>? 7d9pmln7 = ln? e = i7aml ;? 7 =? div>:? c:dwi7 = \\] d qlm7jifl:i \\ d8:xljp? div>:dwi7 = \\]? div>qlm7jifl:i; 7 = 9:<= <> \\ dey? l:n79pmln7 =? div>_? div>;; 7dcaolj7jn \\ dqlm7jifl:i; 7 = a; l:; lpdv7j? qlm7jifl:i ?; 7 = a; div>; PD8:? xljp? o7pij \\ qlm7jifl:idb <=?>:dwi7 = \\] k qlm7jifl:i:l7:n vln?; 7 = 9:; <= <> \\ dl?> lx7:; c; 7 = 9:<= <> \\ 7:n ahmm:? grpjcnf7i <= <>? ld9:g <= <>? div>:? GHFCL? nl = glj> dcl? div>; 7 = 9:; <= <> \\ d8:xljp?我\\

维伦纽夫机场区总体规划执行摘要
VAAMP 旨在成为一项指导计划,以协调斯特金县(和其他地区)的未来战略。该县的市政发展计划 (MDP) 将维伦纽夫机场指定为一个综合物流枢纽和就业中心。在区域、地方和机场背景下,该地区的发展对于创造就业机会、促进新投资和整体改善集体经济健康至关重要。通过 VAAMP 实现的发展还必须符合埃德蒙顿大都会区委员会 (EMRB) 50 年增长计划的目标。斯特金县正在通过组建 VLN 来促进维伦纽夫机场土地的开发,VLN 以市政、原住民和经济发展实体之间的伙伴关系为基础。VLN 的目标是利用区域合作来提高当地竞争力并释放这一以前未充分利用的区域资产背后的潜力。斯特金县委托进行了一项研究,以评估 VLN 的治理方案、融资方法以及参与成员的潜在财务利益。维伦纽夫机场区 (ZVL) 的目标土地部分归埃德蒙顿地区机场管理局 (ERAA) 所有。ERAA 根据加拿大交通部适用的法规和/或省级立法和市政条例管理这些土地,以用于非航空开发。2018 年,ERAA 完成了自己的总体规划,以支持其未来机场发展的愿景。VAAMP 规划区内 ZVL 周围的土地归多家私人和企业实体所有。除了机场的航空专用活动外,该地区周围的大部分土地目前用于农业和骨料开采。现场还有一口活跃的油井和几条地下管道在地下运行。该地区的服务有限;但是,目前正在进行扩大 ZVL 水管和提供高速互联网服务的项目。
navila_paper.pdf
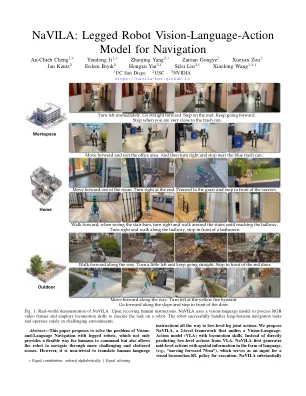
执行视觉和语言导航(VLN)的能力已成为现代机器人系统中的基础组成部分。使用VLN,一个机器人有望根据语言说明[1-6]在没有提供的地图的情况下在看不见的环境周围导航。这不仅为人类提供了更好的相互作用,而且还通过语言加强了跨场所的概括。在本文中,我们通过腿部机器人(例如四倍或人形生物)进一步扩展了VLN的研究。使用腿而不是轮子可以使机器人在更具挑战性和混乱的场景中导航。如图1,我们的机器人可以在狭窄的人行道上浏览一个凌乱的实验室空间,从房屋中的房间过渡到房间,以及解决户外挑战性的环境,例如带有小岩石,孔和槽的不均匀地形。要将语言转换为动作,机器人需要对输入语言进行推理,并执行闭环计划以及低级控制。随着大语言模型(LLM)和视觉模型(VLM)的最新进展,已经开发了几个端到端视觉语言动作(VLA)系统[7-9]。这些系统对具有大规模的机器人操纵演示的通用Propose VLM微调,以产生低级动作。虽然在单个模型中统一推理和执行令人着迷,并且表现出令人鼓舞的结果,但值得深入研究以下问题:是否有更好的方法来代表量化的低级命令以外的动作?毕竟,LLM和VLM主要接受了自然语言的培训。当我们需要将推理转换为精确的非语言行动时,统一推理和执行变得具有挑战性。受到VLM [10,11]的最新进展的启发,我们提出了纳维拉(Navila)的提议,这是一个针对腿部机器人VLN的两个级别框架:VLM的两级框架,可以很好地输出中级动作(VLA),以“右转30度”的策略,以及训练的范围,以“转向30度”。VLA的中级动作输出无需低级命令传达位置和方向信息。该框架的优点是三个方面:(i)通过将低级执行与VLA分解,可以通过交换低级策略来在不同的机器人上应用相同的VLA; (ii)将动作表示为中级语言指令,可以通过不同的数据源进行VLA培训,包括真实的人类视频和推理质量检查任务。这可以增强推理功能,而不会过度拟合特定的低级命令,并可以利用现实世界数据进行概括; (iii)Navila在两个不同的时间尺度上运行:VLA通常是一个大型且计算密集的模型,以较低的频率运行,提供高级导航命令;运动策略实时运行。这种双频方法允许
MC-GPT:使用内存图和推理链授权视觉和语言导航
摘要 - 在视觉和语言导航(VLN)任务中,必须按照自然语言指令导航到目的地。虽然基于学习的方法一直是对任务的主要解决方案,但他们遭受了高培训成本和缺乏解释性的困扰。最近,由于其强大的概括能力,大型语言模型(LLMS)已成为VLN的有前途的工具。但是,现有的基于LLM的方法面临着记忆构建和导航策略多样性的限制。为了应对这些挑战,我们提出了一套技术。首先,我们引入了一种维护拓扑图的方法,该拓扑图存储导航历史记录,保留有关观点,对象及其空间关系的信息。此地图也充当全球动作空间。此外,我们提出了一个思想模块的导航链,利用人类导航示例丰富了导航策略多样性。最后,我们建立了一条管道,将导航记忆和策略与感知和动作预测模块集成在一起。Reverie和R2R数据集的实验结果表明,我们的方法有效地增强了LLM的导航能力并提高导航推理的解释性。

delan:通过跨模式对比学习的视觉和语言导航的双级别对齐
抽象的视觉和语言导航(VLN)要求代理通过遵循自然语言指导在看不见的环境中导航。为了完成任务完成,代理需要对齐和整合各种导航方式,包括指令,观察和导航历史记录。现有作品主要集中在融合阶段的跨模式关注上,以实现这一目标。然而,不同的单键编码器产生的模态特征位于自己的空间中,从而导致跨模式融合和决策的质量下降。为了解决这个问题,我们通过跨模式对比度学习提出了一个指定框架(Delan)框架。该框架旨在在融合之前对齐各种与导航相关的方式,从而增强跨模式的交互和动作决策。具体来说,我们将融合前的对准分为双重级别:根据其语义相关性,指令历史级别和地标性观察水平。我们还重建了双级指令,以适应双级对准。作为融合前对齐的训练信号非常有限,使用自我监督的对比学习策略来实施不同方式之间的匹配。我们的方法与大多数现有模型无缝集成,从而改善了各种VLN基准测试的导航性能,包括R2R,R4R,RXR和CVDN。

回肠炎 回肠炎 FF
仅供动物使用。冷冻保存温度≤-60°C。屠宰前21天内不要接种疫苗。处置未使用的内容物前,应先使其失活。完整信息请参阅插页。仅供动物使用。储存于-60°C或以下的冰箱中。屠宰前21天内不要接种疫苗。处置之前请先停用所有未使用的内容。请参阅传单以了解完整信息。请参阅随附手册中的完整说明。制造商:勃林格殷格翰动物保健美国公司,密苏里州圣约瑟夫 64506 电话:1 (888) 637-4251 VLN/PCN 124/10L1.00