XiaoMi-AI文件搜索系统
World File Search SystemVM

事件手册-2024 for Web
mvis o o o o potable可变消息标志(VM)和智能运输系统(ITS)解决方案(以销售和租用)向英国一些最大的活动。专门从事太阳能事件的官能管理产品,MVI提供了帮助进行事件官方控制,事件安全/安全和方式发现的解决方案,从而帮助活动有效,安全地运行。
富满微电子集团股份有限公司
供电电源 VDD ........................................................................................................................................... .. -0.3V~+10V VM 、 COUT 端允许输入电压 .................................................................................................. ....VDD-25V~VDD+0.3V DOUT 端允许输入电压 ......................................................................................................................- 0.3V~VDD+0.3V 工作温度 TA ..................................................................................................................................................- 40 ℃ ~+85 ℃ 结温 ........................................................................................................................................................................... 150 ℃ 贮存温度 .......................................................................................................................................................- 65 ℃ ~150 ℃ 功耗 PD ( TA=25 ℃) SOT23-6 封装(热阻 θJA = 200 ℃ /W ) .................................................................. ..625mW 焊接温度(锡焊, 10 秒) ..................................................................................................................................... 260 ℃

R.Avaflow V4,一个多功能滑坡仿真框架
表1:对于最多三个阶段中的任何一个中的任何一个,x方向通量和源术语控制流动动力学。y方向上的术语以类似的方式提出。u x和u y = x和y方向的深度平均速度; UU VM和UV VM =虚拟质量贡献(Pudasaini and Mergili,2019年); dt =分散术语(Pudasaini,2023); g x = x方向重力的有效下坡分量; F D =变形系数(Pudasaini和Mergili,2024a); k x = x方向地球压力系数; G Z +和G Z- =重力的有效斜率正常成分,包括不同的浮力效应(Pudasaini和110 Mergili,2019年); G Z * =有效的重力斜率正常成分,包括浮力和曲率效应; C drag =阻力系数(Pudasaini and Mergili,2019年); δ=基底摩擦角; c =内聚力; E V =通过剪切系数通过剪切系数损失(Pudasaini和Mergili,2024b); φ=内部摩擦角; f ml =碎片数(Pudasaini等,2024); ζ=湍流摩擦数; n =曼宁号码;和C AD =环境阻力系数。绿色表示输入参数,蓝色表示派生的参数。115


tdxDown:单步进和指令计算针对英特尔TDX
可信赖的执行环境是解决云计算引入的数据隐私和信任问题的有前途解决方案。因此,所有主要的CPU供应商集成了信任的执行环境(TEE)。对TEE安全性的最大威胁是侧向通道攻击,其中单步攻击是最强大的攻击。由Tee At-At-At-At-At-At-Topping攻击启用,攻击者可以一次执行Tee One指令,从而实现大量基于受控的基于渠道的安全性问题。Intel最近推出了其第二代T恤的Intel TDX,该Tex保护了整个虚拟Ma-hises(VM)。为了最大程度地减少攻击表面到侧通道,TDX具有专用的单步攻击对策。在本文中,我们系统地分析了Intel TDX的单步量,并首次显示内置检测启发式启发式以及预防机制,都可以绕开。通过欺骗用作检测启发式的一部分的经过的处理时间,我们可以可靠地单步TDX保护VM。此外,我们的研究揭示了单步骤的对策中的设计缺陷,该设计缺陷将预防机制转化为自身:预防机制中的固有侧道通道泄漏了TDX保护的VM执行的指令数量,从而实现了我们将新颖的攻击我们称为StumbleSteppping。两种攻击,单步脚和绊脚石,都可以在最新的Intel TDX启用Xeon可伸缩CPU上工作。最后,我们建议对TDX的变更,以减轻我们的攻击。使用绊脚石,我们展示了一种针对WolfSSL的ECDSA实施的新型端到端,从而利用了基于截短的非CEN算法中的控制侧侧通道。我们提供了一项系统的非CEN截断性信息研究,揭示了OpenSSL中的类似泄漏,我们通过单稳定的原始原始性来利用这些泄漏。

Armv8-A 虚拟化
VM 的经典定义是独立的、隔离的计算环境,与真实的物理机器没有区别。尽管可以在基于 Arm 的系统上完全模拟真实机器,但这通常不是一件高效的事情。因此,这种模拟并不常见。例如,模拟真实的以太网设备很慢,因为 Guest OS 对模拟寄存器的每次访问都必须由虚拟机管理程序以软件方式处理。这种处理比访问物理设备上的寄存器要昂贵得多。
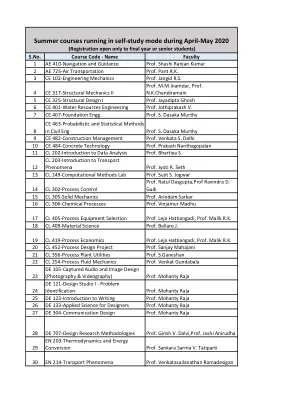
2020 年 4 月至 5 月期间以自学模式开设的暑期课程
107 EE 325-概率和随机过程教授Gaurav S. Kasbekar 108 EE 328-数字通信教授Kumar Appaiah 109 EE 334-电力系统教授Kulkarni AM 110 EE 338-数字信号处理教授Gadre VM 111 EE 602-雷达系统教授Kushal R. Tuckley 112 EE 609-辐射系统教授库沙尔·R·塔克利

一月网络安全意识日历2024
“假设违规。”零信任,用于在现代安全体系结构中对用户进行身份验证,是一个框架,可确保远程工人,保护混合云环境,并保护组织免受勒索软件威胁。就像攻击表面管理(ASM)不限于表面一样,零信任看起来超出了传统周围。该方法也是脆弱性管理(VM)的支柱。毕竟,最不可预测的脆弱性是您的屏幕和椅子之间的呼吸。在这里了解更多。