XiaoMi-AI文件搜索系统
World File Search SystemWrist

LORIS:用于极端地形探索的轻型自由攀爬机器人
摘要 — 攀爬机器人可以调查传统探测车由于地形陡峭而无法到达的具有科学价值的地点。配备微棘爪的机器人特别适合攀爬岩石峭壁,但大多数现有设计要么体积大、速度慢,要么仅限于相对平坦的表面(如墙壁)。我们提出了一种新型自由攀爬机器人,通过创新爪设计和力控制来弥补这一差距。完全被动的爪和腕关节可实现安全抓握,同时减轻质量和复杂性。使用基于优化的控制策略在机器人的爪之间分配力,以最大限度地降低意外脱落的风险。机器人原型已经展示了在地球重力环境下在平坦的煤渣砌块墙壁和不平坦的岩石表面上的垂直攀爬。

运动想象脑机接口康复系统增强中风患者上肢表现并改善大脑活动:一项临床研究
本研究比较了运动想象脑机接口(MI-BCI)联合物理治疗与单纯物理治疗在缺血性卒中康复训练前后的疗效,探讨MI-BCI的康复效果是否受患者病情严重程度影响,以及MI-BCI是否对所有患者都有效。40例住院缺血性卒中合并运动障碍患者参与了本研究,患者分为MI组和对照组,在康复训练前后进行功能评估。以Fugl-Meyer评分(FMA)为主要结局指标,其肩肘评分和腕关节评分为次要结局指标,采用运动评估量表(MAS)评估运动功能恢复情况。采用非造影CT(NCCT)探讨不同类型的大脑中动脉高密度征对缺血性卒中预后的影响。脑拓扑图能够直接反映大脑的神经活动,利用脑拓扑图来检测中风后脑功能的变化和脑拓扑功率响应。与康复训练后的 MI 组和对照组相比,MI-BCI 康复后功能结果更好,包括总 FMA 评分(MI = 16.70 ± 12.79,对照组 = 5.34 ± 10.48)、FMA 肩肘评分(MI = 12.56 ± 6.37,对照组 = 2.45 ± 7.91)、FMA 腕评分(MI = 11.01 ± 3.48,对照组 = 3.36 ± 5.79)、MAS 评分(MI = 3.62 ± 2.48,对照组 = 1.85 ± 2.89)、NCCT(MI = 21.94 ± 2.37,对照组 = 17.86 ± 3.55)实现相关增加的可能性显著更高。研究结果表明MI-BCI康复训练比常规康复训练更能有效改善脑卒中后上肢运动功能障碍患者运动功能,验证了主动诱导神经康复的可行性。患者病情的严重程度可能会影响MI-BCI系统的康复效果。
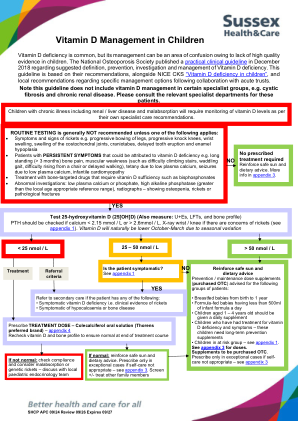
儿童维生素 D 管理 - NHS Sussex
一般不建议进行常规检测,除非出现以下情况之一:• 佝偻病的症状和体征,如进行性罗圈腿、进行性膝外翻、腕关节肿胀、肋软骨关节肿胀、颅骨软化、牙齿萌出延迟和牙釉质发育不全• 患者持续出现可归因于维生素 D 缺乏的症状,如长期(> 3 个月)骨痛、肌肉无力(如爬楼梯困难、蹒跚步态、从椅子上站起困难或行走延迟)、低血浆钙导致的手足搐溺症、低血浆钙导致的癫痫、婴儿心肌病• 使用需要维生素 D 充足的骨靶向药物(如双磷酸盐)治疗• 检查异常:低血浆钙或磷酸盐、高碱性磷酸酶(大于当地年龄适当参考范围)、X 光片 - 显示骨质减少、佝偻病或病理性骨折
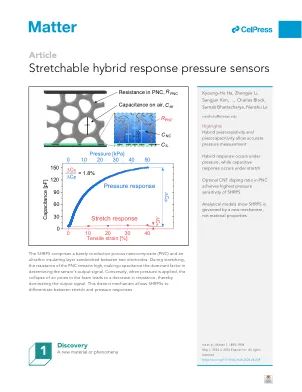
可拉伸的混合响应压力传感器
摘要触摸敏感的可拉伸电子皮肤(E金)对软机器人,假肢,生物模仿者和生物传感器保持了希望。但是,长期以来的挑战是伸展压力读数的干扰。解决此问题,我们引入了一个本质上可拉伸的杂化压力传感器(SHRP),该响应压力传感器(SHRP)由层压板组成,该层压板具有几乎没有导电的多孔纳米复合材料和位于两个可拉伸电极之间的超薄介电层。SHRP的压电和压电响应的联合压电和压电响应可以使超高压力灵敏度有效地消除拉伸诱导的干扰。我们的发现的基础是经过实验验证的电子模型。在实际应用中,安装在孔径上的shrps在人手腕上表现出安全,精确的触诊,并符合轮廓的ob o骨。SHRP的首次亮相有望显着扩大E-Skins的垂直应用。

通过单目摄像头跟踪人体姿势,实现经济高效的机械臂远程操作
摘要。机器人远程操作是执行复杂任务的重要工具,这些任务需要超出最先进算法能力的灵活性。现有的远程操作方法通常对人类操作员来说不直观,或者需要特殊的传感器和设备,这使得它们在许多情况下成本低且不切实际。在本文中,我们提出了一种依赖单目相机图像的机械臂远程操作框架。所提出的框架首先使用轻量级神经网络来估计人类操作员的身体姿势并识别他们的手势。然后,一种高效的逆运动学算法找到所需的机械臂配置,实现模仿操作员手腕运动的末端执行器运动。我们的远程操作框架可以在普通笔记本电脑上使用网络摄像头和任何具有 ROS 接口的机械臂执行。我们在 Kinova Jaco 机械臂的实际实验中验证了它的性能,展示了在环境中抓取和移动物体的能力。

身高:_____ 体重:______ 男/女
a. 创伤性脑损伤/头部 Y / N i. 头晕 Y / N q. 腿 Y / N b. 鼻子 Y / N j. 头痛 Y / N r. 肾脏 Y / N c. 下颌/牙齿 Y / N k. 手腕 Y / N s. 记忆 Y / N d. 面部 Y / N l. 手 Y / N t. 麻木 Y / N e. 颈部 Y / N m. 手臂 Y / N u. 寒冷天气注射 Y / N f. 背部 Y / N n. 膝盖 Y / N v. 炎热天气注射 Y / N g. 肘部 Y / N o. 脚踝 Y / N w. 葡萄球菌感染 Y / N h. 肩部 Y / N p. 脚 Y / N x. 癣 Y / N

引用本文为:Bayındır O, Akyüz G, Sekban N. 将机器人辅助手部康复添加到常规康复计划中对
HandTutor(Meditouch Ltd.,以色列中央邦阿拉瓦 Rotem 工业园)是一种机器人辅助治疗工具,由一个连接到软件的人体工程学手套组成。它允许手腕运动和小手关节运动,并利用视觉听觉反馈。基于互动式电脑游戏的锻炼计划旨在提高粗大/精细运动技能以及认知功能。一项初步研究调查了 HandTutor 对急性-亚急性中风患者的有效性,得出结论:与传统康复计划相比,HandTutor 在功能能力方面取得了更好的效果。[5] 然而,作者建议,在未来的试验中,应针对中风时间较长的患者研究 HandTutor 与功能康复计划的有效性。因此,在本研究中,我们旨在调查在传统康复计划中添加机器人辅助手部治疗(HandTutor)对中风幸存者上肢运动改善和 ADL 手部功能的有效性,与单独使用传统康复计划相比。

鼠标处理和技术。 ...
捡起成年老鼠时,将它们轻轻但牢固地抓住在尾巴的底部或中心。不要用尾巴的尖端捡起它们。将动物放在钢笼顶部或盖子等表面上(图5A)。最好的表面不是光滑的或光滑的,因为如果老鼠的地位牢固,则表现得更加平静。保持尾巴,将另一只手的拇指和第一根手指放在下背部。轻轻向下并向前,直到到达脖子后部的额外皮肤,触摸耳朵。(图5b)。将松散的皮肤牢固地捏住(图5C),抬起鼠标,将尾巴拉到手腕上,并用戒指/小指固定尾巴(图5D)。如图所示,可以用最后两个手指握住尾巴(图5E)。您的抓地力应该足够坚硬,以防止鼠标挣扎,但足够温和,可以舒适地呼吸。

评论文章航空疲劳 - DergiPark
疲劳是影响航空安全的关键因素,它会通过降低执行需要高阶智力处理的任务的能力而导致人为失误。慢性疲劳更加隐蔽和主观。导致疲劳的因素包括睡眠不足、机组人员排班、长时间值班、时差或轮班、高工作量以及缺乏身体或精神健康。有主观和客观的测量方法来估计疲劳程度。主观技术基于睡眠和疲劳的自我报告,而客观干预则基于受试者的生理特征(脑电波、眼球注视、面部特征识别)或其身体表现(肌肉张力、手腕不活动、头部方向)。疲劳测量旨在支持和维持长时间或平稳值班期间的警觉性和表现。疲劳对策主要基于自我报告的数据,自我报告需要“安全”因素。本研究旨在评估航空业遇到的疲劳并回顾用于预防疲劳的方法。