XiaoMi-AI文件搜索系统
World File Search SystemYAW

iEFIS Explorer 简介 - MGL Avionics
SP-7 “CAN” AHRS(最多可连接 4 个以实现冗余,但每个 iEFIS 也能够根据精确的 GPS 测量显示地平线)。SP-6 “CAN” 指南针(最多可连接两个指南针系统)。RDAC XF 和 RDAC XF MAP – MGL 的新型发动机监视器。最多可连接 4 个,这意味着您可以监控最多 4 个发动机(包括涡轮机)。MGL 伺服 – 基于 CAN 的伺服兼容,在此阶段最多可连接三个(倾斜、俯仰和偏航)。MGL V6 和 MGL V10 VHF COM 无线电。这些完全兼容。最多可连接两个,并从任何 iEFIS 面板进行控制。MGL/Garrecht 模式-s 转发器。此远程安装转发器可由 iEFIS 面板完全控制。MGL 导航无线电。双 VOR、ILS、下滑道和标记接收器(目前正在开发中)。MGL 襟翼/配平电机控制器。此基于 CAN 的接口可直接驱动直流电机以控制襟翼和配平。

无框神经训练,具有计算机视觉和实时跟踪的床边外部室外排放位置:尸体研究
客观,通过图像指导技术改善床旁神经外科手术程序安全性和准确性的主要障碍是缺乏针对移动患者的快速部署,实时的注册和跟踪系统。这种缺陷解释了外部室排水的徒手放置的持续性,该室外排水口具有不准确定位的固有风险,多次通过,流血出血以及对邻近脑实质的伤害。在这里,作者介绍并验证了无框立体神经纳维加菌和导管放置的新型图像登记和实时跟踪系统。方法使用计算机视觉技术来开发一种几乎连续,自动和无标记的图像注册的算法。该程序融合了受试者的预处理CT扫描中的3D摄像头图像(快照表面),并且通过人工智能驱动的重新校准(Real-Track)进行了患者运动。计算了5个发生串行运动(快速,缓慢的速度滚动,俯仰和偏航运动)的5个尸体头部的表面注册误差(SRE)和目标注册误差(TRE),以及几个测试条件,例如有限的解剖学暴露和不同的受试者照明。使用模拟的无菌技术将六个导管放在每个尸体头(总计30个位置)中。过程后CT扫描允许比较计划的和实际导管位置,以进行用户错误计算。的结果注册对于所有5个尸体标本都成功,导管放置的总体平均值(±标准偏差)SRE为0.429±0.108 mm。TRE的精度在1.2毫米以下保持在1.2 mm的范围内,整个标本运动的低速和高速滚动,俯仰和偏航的速度最高,重新校准时间最慢,为0.23秒。当样品被覆盖或完全不覆盖时,SRE没有统计学上的显着差异(p = 0.336)。在明亮的环境与昏暗的环境中进行注册对SRE没有统计学上的显着影响(分别为p = 0.742和0.859)。对于导管放置,平均TRE为0.862±0.322 mm,平均用户误差(目标和实际导管尖端之间的差异)为1.674±1.195 mm。结论这个基于计算机视觉的注册系统提供了对尸体头的实时跟踪,其重新校准时间少于四分之一的一秒钟,并具有亚毫升准确性,并启用了毫米准确性的导管放置。使用这种指导床旁心室造口术可以减少并发症,改善安全性并将其推断到清醒,非肌化患者中的其他无框立体定向应用。

风能转换系统的数字孪生
摘要:工业 4.0 的数字孪生概念将为风能转换系统带来许多优势,例如,在状态监测、预测性维护和控制或设计参数优化方面。虚拟副本是数字孪生的核心。要构建虚拟副本,必须为涡轮机组件选择适当的建模技术。选择这些模型时必须考虑数字孪生的预期用例,在模型保真度和计算负载之间找到适当的平衡。这篇评论文章概述了有关涡轮机空气动力学、结构和传动系统力学、永磁同步发电机、电力电子转换器以及俯仰和偏航系统的建模技术的最新文献。对于每个组件,都给出了具有不同模型保真度和计算负载的模型的平衡概述,范围从简化的集中参数模型到基于高级数值有限元方法 (FEM) 的模型。文献综述的结果以图形方式呈现,以帮助读者进行模型选择。在此基础上,提出了数字孪生的高级结构以及具有最小计算负载的虚拟副本。提出了多级分层虚拟副本的概念。
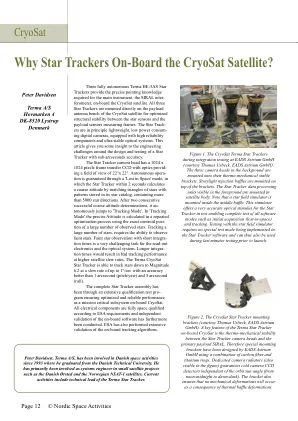
为何 CryoSat 卫星上配备星体追踪器?
1024 像素帧传输 CCD,光学元件提供 22°x 22° 的视野。通过“迷失太空”模式保证自主操作,在该模式下,星体跟踪器在 2 秒内通过将星星的三角形与存储在其星表中的图案进行匹配来计算粗略姿态,其中包含 5000 多个星星方向。连续两次成功确定粗略姿态后,它会自动跳转到“跟踪模式”。在“跟踪模式”下,使用大量观测恒星的精确质心位置,通过重复优化过程计算出精确的姿态。跟踪大量恒星需要能够观察暗淡的恒星。对于读出电子设备和光学系统来说,在短积分时间内观测暗星是一项非常具有挑战性的任务。较长的积分时间会导致卫星旋转速率较高时跟踪性能不佳。Terma CryoSat 星跟踪器能够以高达 1°/秒的旋转速率跟踪低至 6.2 等的恒星,精度优于 1 角秒(俯仰/偏航)和 5 角秒(滚动)。

鹰狮 C 系列包装铁。 - 萨博
1.鹰狮 C 驾驶舱 2.皮托管 3.涡流产生板条 4.玻璃纤维天线罩 5.自动测向仪 (ADF) 天线 6.爱立信 PS-05 多模雷达 7.驾驶舱前部压力舱壁 8.偏航叶片(位于前机身下方且视野之外) 9.下超高频 (UHF) 天线(位于前机身下方且视野之外)视野) 10.入射叶片 11.编队照明条 12.方向舵踏板 13.挡风玻璃 14.广角抬头显示器 (HUD) 15.驾驶舱顶篷,铰接至左舷 16.顶篷破坏器微型引爆线 (MDC) 17.右舷进气口 18.MARTIN-BAKER MK10L ZERO-ZERO 弹射座椅 19.驾驶舱后部压力舱壁 20.发动机油门杆 21.左舷控制台面板 22.驾驶舱部分复合蒙皮镶板 23.带一体式滑行灯的前轮舱门 24.缩回执行器 25.双轮前起落架 26.液压转向千斤顶 27.27MM 大炮 28.左舷进气口 29.边界层分离板
MARK ORTIZ CHASSIS 新闻通讯 - Zonagravedad
2000.5 – 后防倾杆;车轮和车轴偏移的影响;使操纵更一致;齿轮比和 RPM 的关系 2000.6 – 后弹簧分割的影响;使用制动浮子 2000.7 – 后期车型在路面上的刹车失灵;极惯性矩(偏航惯性) 2000.8 – 冲击动力学 – 冲击测功机能告诉您和不能告诉您什么;气压的影响;控制比;固有频率、阻尼强度和抓地力 2000.9 – 如何为四轮定位对汽车进行拉线;主销后倾角的影响 2000.10 – 检查后轴的直线度;扭矩臂与拉杆 2000.11 – 建议的淡季阅读材料 2000.12 – 弹簧、滚动和转弯平衡;短潘哈德杆与长潘哈德杆 2001.1 – 短道车的风洞测试;后脚轮;堆叠式螺旋弹簧 2001.2 – 所需框架刚度;制作压载物 2001.3 – 安全问题 – HANS 装置;软壁设计要求 2001.4 – 第 5 个线圈的位置和速率;软壁更新;汽车上的软鼻子 2001.5 – 普通汽车中的铬钼;后交错与交叉

自适应控制容错自主载体... - SOAR
本文介绍了自适应控制方法在将自主固定翼飞机回收到航空母舰上的应用。所用的控制结构是模型参考自适应控制,在俯仰、滚转、偏航和空速轴上实施,以提供飞机的 6 个自由度控制。控制系统是为 NAVAIR ExJet 飞机模型开发的。控制器的结构包括一阶线性模型跟随器和自适应批评控制器。自适应用于增强自适应批评控制器产生的命令信号,使用以下方法:自适应偏差校正器、最佳控制修改和局部线性模型补偿。基于状态空间模型的逆控制器生成控制效应器命令。控制系统参考输入是旋转速率和空速,提供外环控制器来引导飞机到达着陆点。控制系统设计是通过使用基于标称误差、时间延迟裕度和着陆精度的指标来实现的。在标称、效应器故障和控制系统建模错误条件下评估控制系统。定义的控制系统能够在标称、故障和建模错误条件下提供所需的控制。

使用...对飞机表面进行动态建模和控制
滚转和偏航,以及飞机中这些状态的控制,是通过分别改变对升降舵、副翼和方向舵的指令信号来实现的。在本文中,我们仅考虑飞机的两种控制运动,即纵向和滚转运动。这两个控制面是用不同的智能控制器设计和实现的。飞机的这两种运动在飞行过程中很重要,在此期间飞机会从一种状态过渡到另一种状态。为了控制飞机的纵向和滚转运动,分别使用了一组称为升降舵和副翼的控制面。升降舵是位于固定翼飞机后部的可移动控制面,铰接在水平稳定器的后缘,与主翼平行运行,导致飞机旋转,导致飞机爬升和下降,并从机翼获得足够的升力,使飞机以各种速度保持平飞。升降舵是可移动的控制面,可以上下移动。如果升降舵向上旋转,则会减少尾部的升力,导致尾部降低而机头抬高。如果升降舵向下旋转,则会增加尾部的升力,导致尾部抬高而机头降低。降低飞机机头会增加前进速度,而抬高机头会降低前进速度 [1]。
箭头平台
航天器总质量 最多 200kg 任务数据上行链路 28kbps;下行链路 50kbps(低速率)/480kbps(高速率) 指向知识 0.07 度(1 σ) 指向控制 0.08 度(1 σ) 转动速率 0.5 度/秒(横滚/偏航);1.5 度/秒(俯仰) GPS 精度位置 10m;速度 0.02m/s;时间 50ns(1 σ) 设计寿命 >7 年(500km 轨道);>5 年(1,200km 轨道) 运载火箭 阿丽亚娜空间联盟号、阿丽亚娜 6 号、维珍轨道发射器一号,其他拟议 标称轨道 500-1,500km 圆形极地轨道;可适应高度/倾斜度电池锂离子总线电压22-38V非调节C&DH冗余总线@125kbps(SoCan)和1Mbps(SpaceWire)加密AES 256有效载荷电气和数据处理接口电源线(0.5-5A);热传感器线;SoCan总线;SpaceWire总线1同步(1kHz)线路;1 PPS(1Hz)线路TT&C上行/下行链路频段10Ka遥测频率/8Ka命令频率推进电力(氙气HET)最大Delta-V> 800m / s可靠性(非有效载荷)0.96 @ 5年宽带TT&C /通信选项可选Ka波段任务数据链路(1.6Gbps)带2个可操纵天线(15kg / 40W要求) div>

Stingray AUV:小型且经济高效的生态监测解决方案
摘要 — 水下航行器最近在生态监测中变得越来越有用,这在很大程度上要归功于现代计算机提供的先进处理能力。大多数水下航行器都是鱼雷形的,并且是非完整控制的,这使它们效率高,但缺乏精确的机动性。当需要更精确的导航时,会使用一些立方体形状的航行器;但是,由于航行器具有很大的阻力,它们无法利用滑行运动和流体动力升力。Stingray 自主水下航行器 (AUV) 是一款紧凑、轻便的 AUV,具有独特的设计实现。Stingray 的船体是一个碳纤维外壳,具有仿生设计,让人想起了它居住在海洋中的名字。这种流线型轮廓提供非常低的阻力,使航行器能够在水中滑行。Stingray 还使用独特的推进系统,将机翼和尾部上的三个垂直推进器与安装在下方的两个 Voith-Schneider 螺旋桨相结合,用于滚动和俯仰,用于偏航和喘振。此外,这两个螺旋桨还提供了扫射能力,使飞行器能够以六个自由度移动。这使 Stingray 能够轻松地以低速进行机动并以类似直升机的方式悬停,同时还能利用机翼产生的升力像固定翼飞机一样滑行。