XiaoMi-AI文件搜索系统
World File Search Systemaccelerometer

两轮自驾机器人的开发与原型设计
摘要:移动机器人技术是机器人技术的一个分支,在该分支中,自平衡机器人类别尤其令人感兴趣,因为这些机器人有望像人类一样在困难的地形上行走,并可用作研究自主控制系统的平台。本文旨在总结两轮自平衡机器人的发展,并以此作为案例研究,展示计算机控制系统在物理系统中的应用。互补滤波器与三轴陀螺仪和加速度计一起使用,以精确测量两轮机器人的旋转,并将数据提供给比例-积分-微分 (PID) 程序,该程序相应地控制电机的功率,以控制其倾斜并实现自平衡。简而言之,机器人设法在小倾斜角度范围内实现自平衡,但是,设计缺陷(例如传感器在较大倾斜角度下脱落)会导致较大倾斜角度下的不稳定。在未来的工作中,可以采用更复杂的控制算法,并可以彻底探索不同机器人构造的影响。
基于物联网的患者手势识别系统
1 MCET,Desamangalam-679532,喀拉拉邦,印度 摘要:本项目展示了一款专为实时手势识别和应急响应而设计的智能手套。该手套集成了五个柔性传感器来捕捉手指运动,一个加速度计来检测手部方向,以及一个 ESP32 微控制器来处理传感器数据。显示屏提供视觉反馈,而 APR33A3 芯片则支持音频播放。此外,该手套通过蓝牙连接与移动应用程序集成,允许紧急通知闪烁和远程控制灯和风扇等电器。这款智能手套为免提应急响应提供了一种新颖的解决方案。通过识别特定的手势,手套可以触发预先录制的紧急音频消息,向连接的移动应用程序发送通知,甚至远程控制智能家居设备,从而提高需要帮助的用户的安全性和可访问性。索引术语 – 手势识别、柔性传感器。

增强了导航和道路安全的智能头盔
摘要 - 流量是在这个快节奏的环境中每天出现的主要问题。控制该流量以准时到达目的地确实具有挑战性。更具挑战性的是由于实时和车辆移动而导致的变化。The number of accidents is rising despite the presence of traffic signals, optimal traffic distribution, and emergency police nearby.对于稀有潜水员来说,这可能是一个一次性问题。对于经营送货卡车并承担出租车责任的常规驾驶员,此问题非常重要。这项工作对用户进行实时导航援助,而没有分散注意力的注意力,同时促进事故避免事故和检测。上面的目标是通过三个API,即Google TTS,Gemini API和Deepgram API以及MQ3,ACCELEREMOMER和陀螺仪等传感器。本文有助于在开车时处理驾驶员和公众的安全。索引术语 - 人工智能(AI),物联网(IoT),机器学习(ML),道路安全。

莱特肯尼陆军仓库
专用设备:• PM-560 – Patriot PAC-2 前体测试、飞行模拟、故障排除和重新认证。用于导引头测试/验证的消声室,在 MDAGS 级别进行高级故障排除•控制部分测试装置 - 控制部分的飞行模拟测试和重新认证。液压/气动系统• SAD/ESAD 测试 – 确保设备安全性并可验证安全与解除武装 (S&A) 装置和电子安全与解除武装装置 (ESAD) 的可用性•现场电阻测试装置 - 对全能 PAC-2 的所有变体进行现场测试,以确保发射筒和导弹连接之间的连续性并验证导弹是否处于安全状态。便携式,可在世界任何地方使用•惯性传感器组件测试套件 - 用于陀螺仪/加速度计测试的氛围(环境)、加热器、离心机•现代化的地狱火通用测试套件 - 根据需要测试全弹导弹的导引头、激光和氮气供给控制部分测试•现代化的半主动激光导引头测试套件 - 地狱火导弹的先进导引头部分测试

建立长期人类 - 肉体关系囊性纤维化中体育活动识别的机器学习方法
摘要这项研究旨在开发和验证机器学习模型,以预测不同加速度计量的品牌和位置范围内囊性纤维化(CF)的儿童和青少年的强度。患有CF(11.6±2.8岁; 15个女孩)和28名健康青年(12.2±2.7岁; 16岁的女孩)的三十五名儿童和青少年进行了六项活动,而佩戴了基因作用(手腕)和Actigraphs GT9X(手腕和腰围)。使用三个监督的学习分类器(K-Nearest邻居,随机森林和极端梯度增强的决策树)来识别每种PA类型和强度的输入信号模式,并使用10倍的交叉验证来评估分类器的性能。Actigraph GT9X在主要手腕上,腰部和遗传性手腕上的遗传性无法预测剧烈的强度PA活性。所有其他用于活动类型和强度的模型都超过97%的精度,敏感性和特异性大于95%,而不论加速度计品牌,位置或健康状况如何。
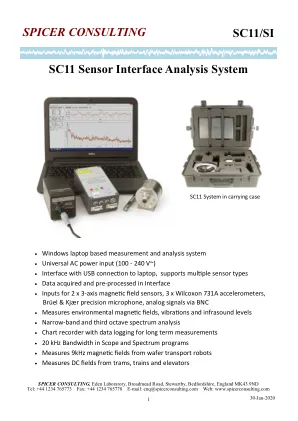
SC11传感器接口分析系统SC11/SI Spicer ...
概述SC11/SI是我们综合现场调查设备的最新版本。它具有数据采集和通过传感器接口中的嵌入式微型计算机进行处理,以增强性能。不需要我们早期系统使用的单独的数据采集卡(DAQCARD)。计算机的数据接口通过行业标准USB连接,该连接使系统可以与运行Microsoft Windows的大多数现代笔记本电脑一起使用。该系统旨在灵活且适应适合客户需求。核心系统包括传感器接口,软件和自定义携带案例。和典型系统还包括DC-13 kHz三轴磁场传感器,加速度计和精确麦克风。该软件套件包括三个虚拟仪器,一个示波器,频谱分析仪和图表记录器,这些记录仪以笔记本电脑屏幕的形式显示。还包括“ SCPLOT”,这是一个全面的结果绘图程序,“ SC11向导”,有助于设置单个测量值和“ SC11调查”,该测量可自动进行完整的调查。

社区移动性和手动轮椅用户的参与评估:当前技术和挑战的审查
根据世界卫生组织的说法,数百个人每天都会开始使用轮椅,通常是由于脊髓损伤等受伤或通过中风等疾病。但是,手动轮椅使用者通常会减少个别社区的流动性和参与。在这篇综述中,对2017年至2023年的文章进行了审查,以确定衡量社区移动性和手动轮椅使用者参与的方法,可能影响这些方面的因素以及当前的康复技术以改善它们。选定的文章通过自我检查,临界评估以及通过GPS和加速度计数据进行远程跟踪的当前最佳实践,康复专家可以申请准确跟踪患者的社区活动能力和参与。此外,康复方法,例如轮椅培训计划,脑部计算机界面触发功能性电刺激疗法以及基于社区的康复计划,显示了提高社区移动性和手动轮椅使用者的参与的潜力。提出建议,以突出未来研究的潜在途径。
![arxiv:2403.05136v3 [cs.ro] 2024年11月24日](/simg/7\7ccb9318234ef0c3c1f022884cbb6b766eba2baa.webp)
arxiv:2403.05136v3 [cs.ro] 2024年11月24日
摘要 - 在本文中,我们提出了一个雷达射量结构,该结构直接利用雷达速度测量值来进行死亡计算,同时保持其在Kalman Filter框架内更新估计的能力。具体来说,我们采用了通过与陀螺仪数据结合使用的4D频率调制连续波(FMCW)雷达获得的多普勒速度来计算姿势。这种方法有助于减轻加速度计偏差和double集成而导致的高漂移。取而代之的是,通过重力测量的倾斜角度与雷达扫描匹配的相对距离测量以及过滤器测量更新的相对距离测量。另外,为了进一步提高系统的准确性,我们估计并补偿了雷达速度量表因子。通过五个现实世界中的开源数据集验证了所提出的方法的性能。结果表明,与最新的雷达 - 惯性融合方法相比,就绝对轨迹误差而言,我们的方法平均将位置误差减少62%,旋转误差平均减少66%。
飞机紧急定位发射器对非
纵向加速度................................................................................ 91 垂直加速度.................................................................................... 91 ELT 跌落测试结果................................................................................ 94 验证测试 2,X 方向................................................................................. 102 验证测试 2,Y 方向................................................................................. 102 验证测试 2,Z 方向................................................................................. 103 验证测试 3,X 方向................................................................................. 103 验证测试 3,Y 方向................................................................................. 104 验证测试 3,Z 方向................................................................................. 104 验证测试 4,X 方向................................................................................. 105 验证测试 4,Y 方向................................................................................. 105 验证测试 4,Z 方向................................................................................. 106 垂直加速度结果:CDR 与 Endevco 加速度计............................................ 118 横向加速度结果:CDR 与 Endevco加速度计 .................. 118 FAA 降落塔和 ATR42-300 .............................................................. 120 尾翼

运输问题
1。Bylinko L.: Integration of an urban transportation system as an element of mobility plans ........................................................................................................................................... 5 2.Warchoł-Jakubowska A.,Krejtz K.,SzczecińskiP。,Wisiecka K.,Duchowski A.T.,Krejtz I。Brozović V., Kezić D., Krile S., Brozović F.: A hardware platform for a maritime collision avoidance system....................................................................................................... 31 4.KozłowskiM.,Czerepicki A.,Dzido p。:低计算功率微控制器控制的自动驾驶汽车模型的车道跟踪算法 Kozicki B., Skrabacz A.: A comparative analysis of injuries and deaths caused by road traffic accidents in Poland and selected EU countries ............................................................. 57 6. MałyszM.,Tomczak P.,Szmytkie R.,Jurkowski W。:基于wroclaw凝聚中的核心层面环境连接的示例,可访问巴士运输的空间区别 węgrzynT.,szczucka-lasota B.,Szymczak T.,olazarz B.,Piwnik J.KozłowskiM.,Czerepicki A.,Dzido p。:低计算功率微控制器控制的自动驾驶汽车模型的车道跟踪算法Kozicki B., Skrabacz A.: A comparative analysis of injuries and deaths caused by road traffic accidents in Poland and selected EU countries ............................................................. 57 6.MałyszM.,Tomczak P.,Szmytkie R.,Jurkowski W。:基于wroclaw凝聚中的核心层面环境连接的示例,可访问巴士运输的空间区别 węgrzynT.,szczucka-lasota B.,Szymczak T.,olazarz B.,Piwnik J.MałyszM.,Tomczak P.,Szmytkie R.,Jurkowski W。:基于wroclaw凝聚中的核心层面环境连接的示例,可访问巴士运输的空间区别węgrzynT.,szczucka-lasota B.,Szymczak T.,olazarz B.,Piwnik J.Juzek M., Słowiński P.: The impact of accelerometer mounting on the correctness of the results obtained in NDT-type tests ..................................................................................... 97 9.Shkvar Ye., Kandume J., Redchyts D.: The key role of modern aerodynamic trends in increasing the energy efficiency of high-speed vehicles........................................................ 107 10.Odachowska-Rogalska E.