XiaoMi-AI文件搜索系统
World File Search Systemampli

微流体石墨烯FET模块化核酸生物传感
石墨烯场效应晶体管(GFET)由于其在生物分子信号扩增中的出色特性而被广泛用于生物传感,在临床诊断中具有高度敏感性和高温和护理测试的潜力。然而,复杂的制造步骤中的困难是GFET的进一步研究和应用的主要局限性。在这项研究中,引入了一种模块化制造技术,以在3个独立的步骤内构建微流体GFET生物传感器。纳入了低熔化的金属电极和复杂的流道,以维持石墨烯的结构完整性并促进后续的感应操作。实用的GFET生物传感器具有出色的长期稳定性,并且在各种离子环境中有效地表现。它还表现出高灵敏度和选择性,可在10 FM浓度下检测单链核酸。此外,当与CRISPR/CAS12A系统结合使用时,它促进了以1 FM浓度的核酸无扩增和快速检测。因此,据信这种模块化的微流体GFET可能会揭示在各种应用中基于FET的生物传感器的进一步发展。

adavosertib增强了曲妥珠单抗deruxtecan在HER2表达癌症中的抗肿瘤活性
摘要◥目的:Cyclin E(CCNE1)被提议为敏感性Toadavosertib的生物标志物,Toadavosertib是一种WEE1激酶抑制剂,ANDA对HER2靶向治疗的抗性机制。实验设计:分析了来自癌症基因组图集和MD Anderson癌症中心数据库的拷贝数和基因组测序数据,以评估ERBB2和CCNE1表达。通过下一代测序,全异位测序,含量的原位杂交 - IHC评估肿瘤和患者衍生异种移植物(PDX)的分子特征(PDX)。在体外,CCNE1过表达或在HER2三细胞系中击倒,以评估药物组合效率。在体内,携带PDX的NSG小鼠与各种治疗方案进行了联合治疗,然后进行肿瘤生长评估。PDX中的药效标记是由IHC和反相蛋白阵列的特征。 结果:在几种ERBB2癌症中,CCNE1共体得到了鉴定(胃肠道37%,内测原43%和PDX中的药效标记是由IHC和反相蛋白阵列的特征。结果:在几种ERBB2癌症中,CCNE1共体得到了鉴定(胃肠道37%,内测原43%和
20. 磁力应用 - DigitalCommons@URI
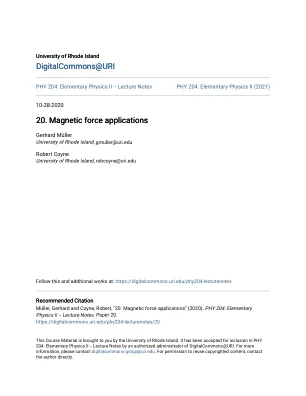
携带音乐或语音信息的声音以纵向压力波和密度波的叠加形式在空气中传播。在麦克风(电换能器)中,声音会引起机械振动,然后转换为电信号。当电信号被放大时,声音可以在扬声器(机械换能器)中重现,如示意图所示。
![PHY204 讲座 20 [rln20]](/simg/7\77d1bdc6052ecbec6e98a8c10a4606692460c1b6.webp)
PHY204 讲座 20 [rln20]
携带音乐或语音信息的声音以纵向压力波和密度波的叠加形式在空气中传播。在麦克风(电换能器)中,声音会引起机械振动,然后转换为电信号。当电信号被放大时,声音可以在扬声器(机械换能器)中重现,如示意图所示。

量子通信的容量量量子中继器
在当今的量子通信中,主要问题之一是缺乏可以同时确保高率和长距离的量子中继器设计。最近的文献已经建立了端到端能力,这些容量是通过量子网络中量子和私人通信的最一般协议可以实现的,其中包括量子中继器链的情况。但是,是否存在实现这种能力的物理设计仍然是一个具有挑战性的目标。在这种动机的驱动下,在这项工作中,我们为连续可变的量子中继器提出了设计,并表明它实际上可以实现这一壮举。我们还表明,即使在嘈杂的政权中,我们的费率也超过了Pirandola-Laurenza-ottaviani-Banchi(PLOB)结合。使用无噪声线性放大器,量子记忆和连续变化的钟形测量值,我们的中继器设置是开发出来的。,我们为我们在设计中使用的连续变量量子记忆的非理想模型提出了一个非理想模型。然后,我们表明,如果使用量子链路太嘈杂和/或低质量的量子记忆和放大器,那么潜在的量子通信率将偏离理论能力。

一种克服PCR扩增偏置的方法
元编码分析最近由于该技术在生物多样性监测中的力量而进行了显着的开发19。ho-20,仍然很难得出21个研究生态系统的准确定量结论,这主要是因为在Envi-22 ronmental DNA中固有的偏见或在实验过程中引入。这23个偏见改变了观察到的DNA量与检测到的物种个体的生物量或数量之间的关系。25个中的2个偏差固有的偏差已经测量:总DNA和靶DNA浓度与PCR 27扩增偏置之间的比率26。提出了一种校正方法。所有实验 - 使用29标记SPER01对模拟高山植物群落进行了28次迈向测试,由于其高度保守的启动位点,预计将具有较低的扩增偏置偏置30。我们的方法结合了stan- 31 dard定量PCR技术(QPCR和数字液滴PCR)与32

多芯光纤上量子密钥分发与放大器光通信的共存
摘要 :研究了光放大器存在时经典信号对多芯光纤(MCF)中量子密钥分发(QKD)的影响。首先,基于先进的非对称发送或不发送QKD(SNS-QKD)和经典的Bennett–Brassard 1984-QKD(BB84-QKD),提出了QKD与经典信号的长距离同时传输架构,并且可以根据需求调整光放大器之间的段长。然后,基于所提出的架构建立了自发拉曼散射噪声和四波混频噪声的理论模型。接下来,推导了经典信号噪声影响下安全密钥速率的计算模型。最后,实验结果表明,理论模型与实验光子吻合良好,实验与模拟噪声光子之间最大差异小于2.6 dB。仿真结果表明,当经典信号和量子信号在MCF的不同芯层中传输时,非对称SNS-QKD架构的性能优于BB84-QKD架构。

循环流化床高功率放大实验...
摘要 — 循环平面正交场放大器 (RPCFA) 由密歇根大学设计、制造和测试。RPCFA 由多个射频源驱动,频率范围为 2.40 至 3.05 GHz,功率为 1 至 800 kW。脉冲电压由带陶瓷绝缘体的密歇根电子长束加速器 (MELBA-C) 输送到阴极,该加速器配置为提供 −300 kV、1-10 kA 的脉冲,脉冲长度为 0.3-1.0- μs。RPCFA 表现出零驱动稳定性和 15% 的带宽。在设计频率为 3 GHz、功率低于 150 kW 的情况下,微波信号的放大率观察到平均增益为 7.87 dB,变化性较高,σ = 2.74 dB。过滤该数据集以仅包含具有相同电压和电流分布的镜头,可获得 6.6 ± 1.6 dB 的增益。当注入的微波功率超过 150 kW 时,平均增益增加到 8.71 dB,变化性降低到 σ = 0.63 dB。峰值输出功率接近 6 MW,RF 击穿限制了设备的最大输出功率。
什么是质粒DNA?质粒生产如何工作?
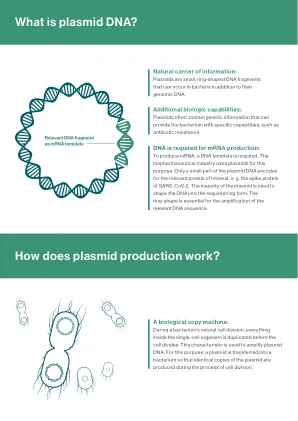
DNA:要产生mRNA,需要一个DNA模板。生物制药行业将质粒用于此目的。只有一小部分质粒DNA编码有关感兴趣的相关蛋白质,例如g。 SARS-COV-2的尖峰蛋白。大多数质粒用于将DNA塑造成所需的环形式。环形对于相关DNA序列的扩增至关重要。

用于隐蔽式耳内脑电图记录的高端和低成本脑电图放大器的系统比较
摘要:可穿戴脑电图 (EEG) 有可能通过脑机接口 (BCI) 改善日常生活,例如改善睡眠、自适应助听器或基于思维的数字设备控制。为了使这些创新更适合日常使用,研究人员正在寻找小型化、隐蔽的 EEG 系统,该系统仍能精确收集神经活动。例如,研究人员正在使用可附在耳朵周围的柔性 EEG 电极阵列 (cEEGrids) 来研究日常生活中的神经激活。然而,这种隐蔽 EEG 方法的使用受到测量挑战的限制,例如信号幅度减小和记录系统成本高。在本文中,我们将低成本开源放大系统 OpenBCI Cyton+Daisy 板与基准放大器 MBrainTrain Smarting Mobi 的性能进行比较。我们的结果表明,OpenBCI 系统是隐蔽 EEG 研究的可行替代方案,具有高度相似的噪声性能,但时间精度略低。对于预算较少的研究人员来说,该系统是一个很好的选择,因此可以为推进隐匿性脑电图研究做出重大贡献。